フライトシミュレータ2020ガイドのこの部分では、フライトのほとんどの部分で飛行機を誘導するオートパイロットをオンにして使用する方法を学びます。オートパイロットの主なモードを紹介し、各フライトの典型的な段階での使用方法を紹介します。また、航空機のモデルに応じて、動作の違いを示しています。
オートパイロットは、責任の膨大な量のパイロットを解放することができる素晴らしいデバイスです。それは、指定されたルートに沿って航空機の制御を引き継ぎ、飛行中に継続的にマシンをトリミングし、正しい高度と、いくつかのモデルでは、また、速度のトラックを保持します。また、航空機を滑走路の真上に着陸させることができ、着陸を簡単に行うことができます。
しかし、オートパイロットはゲーム内での魔法のようなアシストとは程遠いもので、この場合はバーチャルAIの副操縦士に操縦桿を渡すことになります。真のオートパイロットはコンピュータであり、適切なプログラミングを行い、飛行の段階に応じて1つ以上の操作モードを選択する必要があります。最初は複雑に見えますが、例えば新しいスマートフォンを自分の好みに合わせて設定することができれば、現代の航空機でもオートパイロットを扱うことができます。
オートパイロットは通常、飛行機が空港エリアを出て安全な高度まで上昇すると、離陸直後にスイッチが入ります。ILSシステムで着陸する場合、オートパイロットは降下経路でほとんどの時間を使用しており、滑走路の手前付近でオフになり、タッチダウンを「手動」で行うことになります。
Flight Simulator 2020に登場するすべての飛行機にオートパイロットが搭載されているわけではないことを覚えておいてください。ガラス張りのコックピットとガーミンデバイスを搭載したマシンや、旅客機にも搭載されています。機種によって扱いが若干異なる場合がありますが、一般的なルールやモードはどこでも同じです。
次の例は、セスナ172型機に搭載されているガーミンG1000デバイスでのオートパイロットを示しています。セスナ172のオートパイロットはエンジン出力を制御することができません。
注:以下の説明では、フライトシミュレーター2020で航空の冒険を始めるバーチャルパイロットに役立つ、オートパイロットの基本的で最も重要な機能のみを紹介しています。バックコースやVNAVのような、パイロットを訓練する際や非常に高度なプレイヤーにとって重要な、あまり一般的ではないモードについては説明していません。
フライトプラン
スクリーンインターフェースと自動操縦ボタン
自動操縦をオンにする
HDG – 選択したコースモードに従う
ALT – 高度維持モード
NAV – ナビゲーションモードの選択
APR (アプローチ) – 下降パスモード
FPL – フライトプラン
航空機の機種ごとの違い
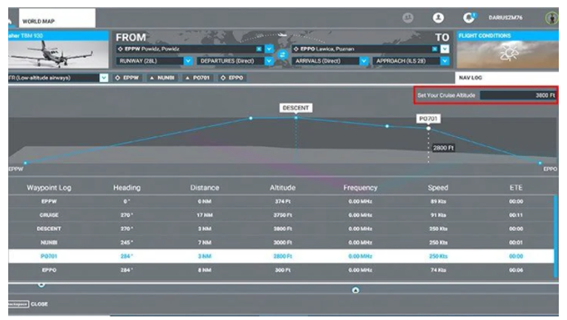
オートパイロットをフルに使いたい場合は、ワールドマップモードで離陸から着陸までの完全な飛行計画を事前に準備しておく必要があります。必要があります – オートパイロットは、どの道を進むべきかを知る必要があります。オートパイロットは、計器飛行モード(IFR)での飛行経路、ILSシステムによる指定された着陸帯、途中にある多数のナビゲーションポイントなど、長く複雑な飛行計画で最も評価されています。
飛行計画書の作成方法の詳細は、「飛行計画書-拡張版」の章に記載されています。
理論的には、一部の航空機ではコックピットから直接ナビゲーションポイントを入力することができますが、これはワールドマップモードで自動的にプランを作成するよりもはるかに複雑で時間のかかる方法です。
小型機(セスナ172のような)では、クルーズ高度をもっと低いもの、例えば5500フィートに変更することができます。 計画なしに離陸することもできますが、これは通常、視界の良い2つの小さな空港間の短距離移動に有効です。
小型機の計画を立てる際には、高度を高く設定する必要はありません。
飛行計画書の作成方法の詳細は、「飛行計画書-拡張版」の章に記載されています。
理論的には、一部の航空機ではコックピットから直接ナビゲーションポイントを入力することができますが、これはワールドマップモードで自動的にプランを作成するよりもはるかに複雑で時間のかかる方法です。
小型機(セスナ172のような)では、クルーズ高度をもっと低いもの、例えば5500フィートに変更することができます。
計画なしに離陸することもできますが、これは通常、視界の良い2つの小さな空港間の短距離移動に有効です。
インターフェースと自動操縦ボタン

1- NAV – VOR または ILS の無線周波数を設定するためのノブとボタン
2 – HDG – HDG モード(ヘディング)でコースを設定するためのノブ(ボタンとしても機能します)。
3 – 個々の自動操縦モードのボタン
4 – ALT – 高度保持モードのノブ
5 – VORおよびILS無線ナビゲーション用のアクティブおよびオプションの周波数を持つウィンドウ
6 – アクティブナビゲーションウィンドウは、我々が飛んでいる(EPPO)と我々が飛んでいる(PO801)、残りの距離(DIS – 距離)、およびポイント(BRG – ベアリング)へのコースからのポイントの名前を示しています。
7 – 垂直速度ウィンドウ – 飛行機がある瞬間にどのくらいの速さで上昇または下降しているかを示しています。
8 – 水平状況インジケーター(HSI) – オートパイロットのアクティブなNAVナビゲーションモード(例:GPS ENR)、現在のコース、HDG(ヘディング)モードのコース、フライトプランからのGPSナビゲーションポイントのコースを表示 – CRS (コース)
9 – CDI – オートパイロット用アクティブナビゲーションモードスイッチ
10 – FPL – フライトプラン – ボタンを押すと、下の隅にフライトプランが表示されます。
2つ目のMFD画面では、アクティブな飛行経路で地図を追うことができます。航空機と一緒に白いアイコンで現在の位置を示しています。

自動操縦をオンにする
オートパイロットは、APとマークされたボタンで作動します。デフォルトのZキーを使うこともできます。ただし、オートパイロットをオンにしただけでは何の効果もありません。この機能はアクティベートされたモードでのみ機能するので、APを押す前に正しいモードを選択する価値があります。
HDG – コースモード
オートパイロットの最もシンプルで基本的なモードは、指定されたコースに沿って飛行するHDG – Headingです。離陸直後から滑走路のコースに沿って安全に高度を稼ぐために使用することができます。ヘーディングモードは、小さな空港間のフライトにも十分で、A地点からB地点までの直行ルートで、標準的な空港サークルに沿って、VFRルールに従って(視界の良い状態で)着陸して終了します。

目的地の空港に向かうなどコースを選択した後、モードパネルのHDGボタンを押し、APを押すとオートパイロットが起動します。所定のコースに向かって旋回を開始し、キャンセルされるか燃料が尽きるまで飛行を続けます。
ALT – 高度維持モード
ALTモードは、オートパイロットの中で最も普遍的で一般的に使用されているモードです。まず、このモードでは、飛行中ずっと一定の高度を維持することができ、例えば数時間の巡航高度など、ラダーやトリムに触れることなく、一定の高度を維持することができます。
さらに便利な機能としては、選択した高度に一定の上昇または下降を設定することができます。例えば、目標高度を20,000フィートに設定し、マシンが自動的に上昇するようにすることができます。これにより特別なサブモードが可能になりますが、オートパイロットがエンジンパワーを制御しない航空機では、オートパイロットが問題なく動作するように、これらの段階でより慎重にエンジンパワーを調整する必要があることを覚えておくとよいでしょう。
高度の維持
あなたはすでにいくつかの高度で飛んでいて、それを維持するために飛行機をしたい場合は、単にツールバーのALTボタンを押すだけで、もちろんAP(オートパイロット)をオンにした状態で。
高度の維持は下記の機能が有ります。

選択した高さまで上昇 – VSサブモード
離陸前でも、いずれかのナビゲーションポイントに目標巡航高度または中間高度を設定することで、できるだけ早く安定した上昇が可能になります。自動上昇の方法の一つとして、VS-垂直速度をフィート/分で求める方法があります。
例えば5,000フィートの上昇高度を設定した後、VSを毎分250~300フィートに設定すると、航空機はその速度で上昇します。5,000フィートに達すると、飛行を水平にして高さ維持モードに入ります。上昇サブモードは、自動エンジンパワー制御のない航空機では、上昇速度が速すぎると減速しすぎてドラッグに陥る可能性があるため、危険な場合があります。小さなVS値を使用し、常にエンジンパワーをコントロールする価値があります。
3,000フィートを超えると、燃料の混合量を減らす必要があることを考慮してください。

1 – ALTノブを使って目標高度を設定します。これはダブルノブで、ベースが広く、エンドが狭くなっているので、数千フィート、数百フィートを独立して調整することができることに注意してください。実際の目標値は高度計テープの上のウィンドウで確認できます。

2 – VS(垂直速度)ボタンを押してから、隣接するボタンを押します。ノーズアップ、ノーズダウン。上昇速度をプラスに、下降速度をマイナスに設定します。現在の速度をフィート/分で表示しているのは、高度計の右側に表示されています。
FLCサブモード
選択した高さまで上昇 – FLCサブモード
VSサブモードの代替として、FLC(Flight Level Change)があります。垂直速度の代わりに、上昇速度をノット単位で設定します。飛行機はその速度で上昇するためにできる限りのことをします。速度が落ちすぎると、速度を上げるために飛行を調整し、さらに上昇を開始します。
これは一般的には安全な上昇方法であり、飛行機が抗力に陥ることはありませんが、高すぎる速度を設定すると、飛行機は常に上下に「揺れ」、乗客の健康に悪影響を与えます。オンラインでいわゆる「クイックリファレンスチャート」を見る価値はあります。”特定の航空機モデルの「クイックリファレンスチャート」をオンラインで見て、最適な上昇速度を確認してください。
1 – FLC(Flight Level Change)サブモードボタンを押してください。隣接するボタンを使います。上昇速度をコントロールするには、ノーズアップ、ノーズダウンを使います。ノット単位の現在の速度は、スピードメーターの上とアクティブなオートパイロットモードのウィンドウで確認できます。

VSおよびFLCサブモード
選択された高さまで降下 – VSおよびFLCサブモード
自動上昇もまた、逆の方法で動作します。着陸アプローチの準備として、ALTノブをアプローチパスの開始点または選択したナビゲーションポイントの目標高度に設定し、次に上記の2つの方法のうちの1つを選択します。VSまたはFLCです。
選択された高さまで降下 – VSおよびFLCサブモード
自動上昇もまた、逆の方法で動作します。着陸アプローチの準備として、ALTノブをアプローチパスの開始点または選択したナビゲーションポイントの目標高度に設定し、次に上記の2つの方法のうちの1つを選択します。VSまたはFLCです。
下降時には、乗客にとってはるかに快適なVSサブモードを選択する可能性が高くなります(飛行機は上下しません)。ノブを現在よりも低い高さに設定して、VSと、例えば毎分250フィートに設定するだけです。すると、飛行機は設定した速度でスムーズに下降を開始します。選択した高度に達すると、ALTモードで維持されます。
レバーを下げてエンジンパワーを適切にコントロールし、3,000フィート以下になったら混合気を増やし、高度や速度が低くなったら徐々にフラップを開いてください。
1 – ALTノブで目標高度を設定します。VS(垂直速度)サブモードボタンを押してから、隣のボタンを押す。ノーズアップ、ノーズダウン。FLCサブモードでは、ノット単位で一定の速度でフライトを下げることもできます – FLCサブモード(Flight Level Change)ボタンを選択し、隣接するボタンを押してください。ノーズアップ(スピードアップ)、ノーズダウン(スピードダウン)。

ナビゲーションモード
NAV – ナビゲーションモードの選択
ナビモードはALT維持モードと同じくらい重要で便利です。単純にHDGでコースを保持するよりもはるかに複雑です。ナビモードでは、飛行計画上に設定された多数のチェックポイントの複雑なルートに沿って飛行することができます。
ナビモードは常にそのサブモードの1つで動作し、コンパスローズの中央にある要素と文字のおかげで簡単に区別することができます。準備された飛行計画での典型的な選択は、GPSまたはFMS(飛行管理システム)になります。いくつかのケースでは、VOR無線局への飛行を選択することになります。ILSシステムでの着陸の場合は、LOCサブモードを選択します。
1 – CDIボタンでNAVナビゲーションサブモードを選択します。ルートの進行中には、コンパスのバラの上にピンクの線と矢印があるGPS/FMSを選択します。

2 – モードパネルからナビボタンを選択します。オンにして、AP自動操縦(まだオンになっていない場合)をオンにして、飛行計画に設定されたルートに飛行機が従うようにします。

3 – 航空機は最も近い航法上のポイントに向かって旋回するのではなく、次のポイントへのコースを示すピンク色のラインに向かって飛行することに注意してください。これは地形上の障害物がある場合や、滑走路の軸に合わせて飛行する必要がある場合に非常に重要です。これを「コースインターセプト」といいます。

4 – GPS/FMSモードでは、航空機はピンク色のルートを辿ります。隣接する画面またはメインパネルの小窓に表示されます。

APR(アプローチ)モードは、自動的に滑走路に降下するために使用されます。これについては、ILS システムでの着陸に特化した次の章で詳しく説明します。
FPL – フライトプラン
FPLボタンは次のオートパイロットモードをオンにしませんが、これを使用するとオートパイロットの操作に役立つ場合があります。FPL(フライトプラン)とは、フライトプランのことで、予定されているすべてのナビゲーションポイントが、その上のコースと設定された天井とともにウィンドウに表示されます。フライトプランを見ることで、次のナビゲーションポイントを制御し、それぞれの目標高度を調整することができます。
これは、降下を開始するときや、特定の高度に着陸するためのアプローチを開始すべき最後のポイントに到達するときに非常に重要になります。異なる空港では、ILS システムは最終降下の開始点でわずかに異なる数字を示唆しています。
航空機の機種ごとの違い
他の機体では、ボタンの配置が若干異なる場合がありますが、その指定や機能は変わりません。TBM 930 Dasherでは、画面上部の指定パネルにオートパイロットを搭載しています。
AUTOMATIC FLIGHT CONTROL SYSTEM
グライドスコープモード(GS)
注: Glideslope モードがアクティブな状態で CWS ボタンを押しても、モードはキャンセルされません。自動操縦CWSボタンを離すと、グライドスロープに戻るように機体を誘導します。
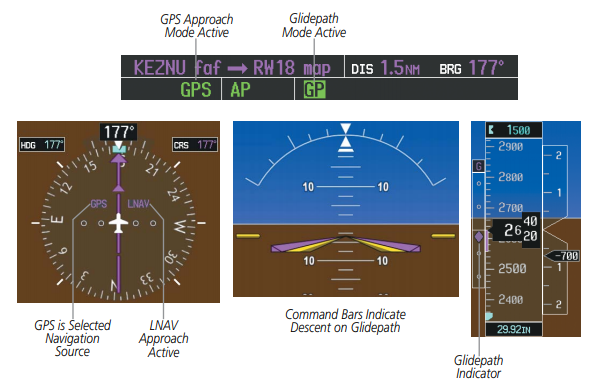
グライドスロープモードは、LOC/ILSアプローチでグライドスロープを捕捉して追跡するために使用できます。
グライドスロープモードを装備しています(白で「GS」と表示されています)、LOCアプローチモードは、横方向のフライトディレクターとして機能します。
モードを選択します。
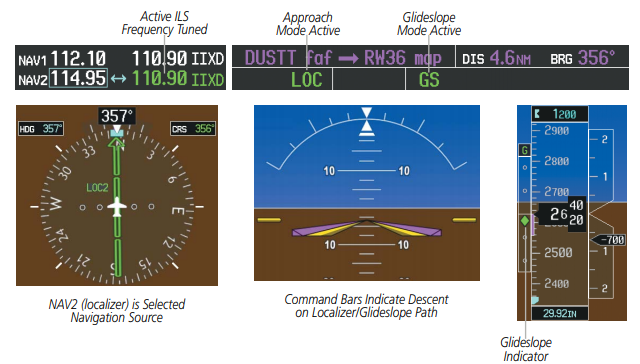
グライドスロープモードの選択1は 有効なローカライザー周波数が調整されていることを確認して下さい。
2) LOC が選択されたナビゲーションソースモードであることを確認します(ナビゲーションソースを切り替えるには CDI ソフトキーを使用します)。 3) APRキーを押すか、またはAPR キーを押します。
1) GPSが選択されたナビゲーションソースであることを確認します(CDIソフト キーを使用してナビゲーションソースを循環させます)。
2) LOC/ILSアプローチがアクティブなフライトプランにロードされていることを確認します。
3) 対応するLOC周波数が調整されていることを確認します。
4) APRキーを押します。

LOCがナビゲーションソースになると、ローカライザーとグライドスロープをキャプチャすることができます。グライドスロープに到達するとフライトディレクターはグライドスロープモードに移行し、グライドスロープをインターセプトして追跡を開始します(463)。
GO AROUND MODE (GA)
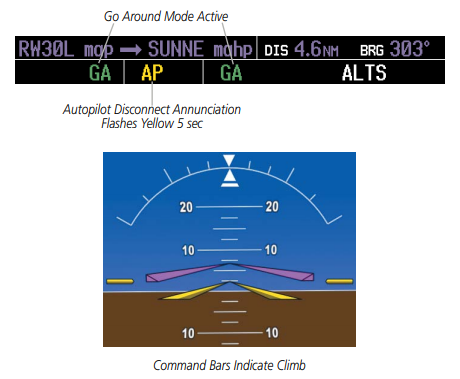
GAスイッチを押すと、フライトディレクターはウィングレベルのピッチアップ姿勢になります。アプローチやゴーアラウンドに失敗した場合に使用します。
このモードはピッチとロールの連成モードで、「GA」と表示されます。
アクティブなピッチモードとロールモードの両方のフィールドで。Go Around Modeは、自動操縦を解除して、選択された自動的に高度捕捉モードになります。その後の自動操縦が可能です。を変更しようとした場合。
CWSボタンまたはNOSE UP/NOSE DNキーを使用して)航空機の姿勢を変更すると、ピッチとロールに戻されホールドモードに移行します(464)。
VNAV 航法チュトリアル [MFD] Direct To(awaypoint) Autopilot Panel [PFD and MFD]
[PFD]Primary Flight Display [PFD]AUTOPILOT OPERATION [MFD] Flight Plans