AIM-20B/Cが発射された後、HUDにインターセプトまでの時間が追加で表示されます。
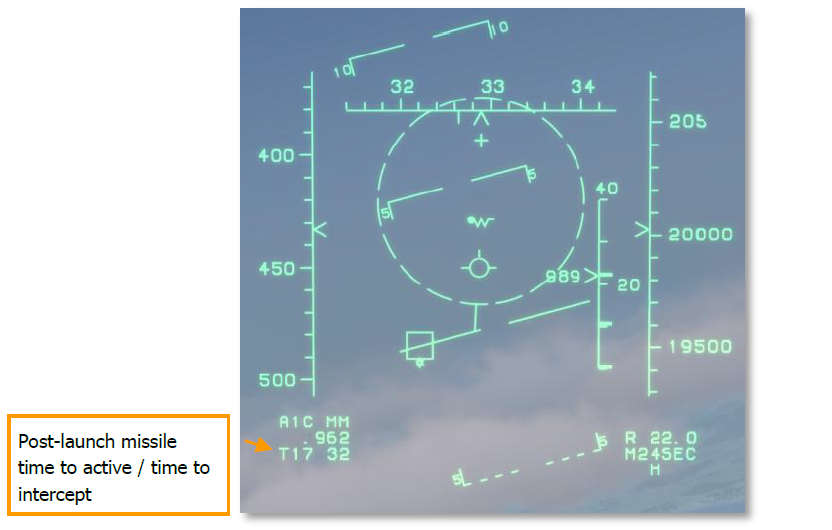
- AIM-120が発射されると、HUDの左下に発射後のT(time to active)/M(time to intercept)データが点滅して表示されます。Tが表示されている場合、右側の数字はミサイルに搭載されているシーカーが作動するまでの残り秒数を示している。その右の数字は、ミサイル迎撃までの推定時間を示しています。ミサイルがシーカー作動距離に到達すると、TはMに変わり、迎撃までの時間だけが残ります。
Auto ACQuisition (AACQ) Radar Modes
Auto ACQuisition (AACQ) Radar Modes
F-15Cは、3つの短距離レーダー自動捕捉モードを採用しています。これらのモードは、ACM交戦時に敵機を自動的にレーダーロックするために使用されます。これらのモードの最大ロック範囲は10海里である。
自動ロックオンモードでは、レーダーは最初に検出されたターゲットを追跡する
Boresight AACQ Mode
BORESIGHT [4]キーモードでは、前方の狭いコーン内のターゲットを自動ロックすることができる。このモードでは、レーダーの視野(FOV)は航空機の真正面で、外側のレティクルはこのスキャンエリアを示しています。レーダーは、FOVに入ってきた最初のターゲットにロックオンします。
ターゲットをロックオンした後、レーダーはSTTモードに切り替わります。
Vertical Scan AACQ Mode
自機と同じ垂直面上にあるターゲットをロックオンすることができます。これにより、高Gを伴う空戦機動(ACM)時に自動的にターゲットをロックオンすることができます。このモードでは、レーダーは幅7.5度、垂直方向に-2~50度の空域をスキャンします。HUDには2本の縦線が表示される。ターゲットをロックアップするためには、この2本の線の間、またはリフトベクトルに沿ってターゲットを配置する必要があります。垂直方向の最大スキャン範囲は、HUDの上部フレームからHUDの高さ2つ分程度です。

ターゲットをロックオンした後、レーダーは自動的にSTTモードに切り替わります。
AN/APG-63(V)1 Radar
第二次世界大戦以降、「全天候型戦闘機」の特徴は、搭載されている航空管制レーダーである。レーダーは、電波が雲を透過する性質を利用して、昼夜を問わず、また目視や赤外線による探知が困難な天候に左右されることなく、空中の目標を探知して武器を照射することができる強力なセンサーです。また、レーダーは非常に長い探知距離を持つため、現代のBVR(beyond-visual-range)空戦では最適なセンサーとなっています。
F-15C戦闘機には、その運用期間中にいくつかのAPG-63レーダーが搭載されてきた。これらのレーダーの大部分は、機械的にスキャンされた平板のスロットアレイアンテナを備えた「Xバンド」(10GHz)レーダーである。MiG-29とSu-27にはそれぞれN019とN001というレーダーが搭載されているが、これらは同じ周波数帯で動作するが、初期のソ連製戦闘機に似たツインリフレクターの「ツイストカセグレン」アンテナを採用している。
これらの迎撃レーダーの特徴と限界は、空中戦のBVR段階で採用される戦術を大きく左右する。多くの詳細はまだ明らかにされていませんが、十分な情報が得られたことで、お互いのハードウェアの限界を利用して優位に立とうとするBVR戦闘の力学について興味深い描写がなされています。
レーダーは、電波を細いビームに集束して宇宙空間に送信し、ターゲットから反射された信号を受信することで動作する。この集束を行うのがレーダーアンテナであり、ビームの狭さがレーダーの最大探知距離やターゲットの分解能に影響を与える。戦闘機の省スペース化のため、できるだけ大きなアンテナで集束力を高めるために、1本のアンテナをパルスモードで使用し、1秒間に数千回、時分割で送信と受信を高速に切り替えている。この変調パルス繰り返し周波数(PRF)は、電波そのもののはるかに高い動作周波数(Xバンドなど)とは異なるものである。
ベトナム戦争において、北ベトナムの戦闘機は、パルスレーダーを搭載したアメリカの戦闘機から身を隠すために、低高度を利用することを学んだ。相手よりも低い高度で飛行することで、敵のレーダーアンテナが地球に対して下向きになるように操縦する必要があるからだ。この「ルックダウン」と呼ばれる形状では、目標から反射されたレーダー信号が、周囲の背景である地球からの反射光にかき消されてしまい、レーダーによる目標の探知や追跡が事実上不可能になってしまう。ルックダウン・ジオメトリーがもたらす防御上の利点は、F-111やトルネードなど、超低空で迎撃から安全に防空を突破するために設計されたNATOの攻撃機の全世代を生み出しました。
APG-63(V)1、N019、N001のような最新のパルスドップラーレーダーは、安定したコヒーレント発振器を採用しており、複数の反射信号を統合して周波数のわずかな変化を検出することができる。ドップラー効果により、接近・離反する航空目標からの反射信号は、地球上で跳ね返ってくる反射信号とは異なる周波数の変化を示す。パルス・ドップラー・レーダーは、高度に関係なくほとんどの航空目標を探知し、追跡し、交戦することができる「ルックダウン/シュートダウン」機能を備えている。ソ連軍にMiG-29が登場したことで、NATOのドクトリンは低空からの攻撃からステルス戦闘機やマルチロール戦闘機へと変化していった。
パルス・ドップラー・レーダーは、地球を背景にした低高度の目標を識別するために、「クロージャー」(目標への接近速度)に依存しています。防御側の航空機は、「ビーミング」または「ノッチ飛行」と呼ばれる戦術によって、パルス・ドップラー・レーダーのロックを解除することができます。これは、敵のレーダー・ビームに垂直な軌道で飛行することです。防御側のパイロットは、航空機のレーダー警報受信機(RWR)ディスプレイに表示される脅威のレーダーを観察し、その脅威を「3時」または「BELSIMTEK 65」の位置に置くように飛行する。
「9時」の位置に配置するように飛行する。防御側の戦闘機は脅威に向かっても遠ざかってもおらず、ルックダウン・ジオメトリーでは周囲の地形と、ルックアップ・ジオメトリーでは展開されたチャフ対策と同じ閉鎖性を持つことになる。

周囲の地形の閉鎖率によって、レーダーの感度に主な「ノッチ」が発生する。これは、レーダーのメインビームの軸に沿って受信される地面からの反射信号(「クラッター」)によるものである。この「ルックダウン・クラッタ・ノッチ」に入ったターゲットの信号は、あたかも地上のクラッタであるかのようにフィルタリングによって除去されるため、ビーミングターゲットはレーダーロックを解除することができる。しかし、アンテナの集束は完璧ではなく、送信されたエネルギーの一部はサイドローブと呼ばれる意図しない方向にもこぼれてしまう。このエネルギーは地上で反射し、サイドローブの方向から再びアンテナに入射することもあります。戦闘機が低高度で飛行している場合、地上で反射した信号がレーダーに入り、追加のクラッタとしてスコープに表示されることがあります。クロージャは戦闘機の上昇率または下降率と同じで、レンジは戦闘機の高度と同じです。戦闘機が同じ速度と距離で逃げるターゲットを追跡している場合、ターゲットの信号がサイドローブクラッタに紛れ、ロックが解除されることがあります。これにより、戦闘機のレーダー感度に二次的な「ノッチ」が発生します。
サイドローブクラッターは通常、小型の「ガード」ホーンアンテナを使ってフィルタリング(補正)されます。ガードアンテナは、サイドローブ方向にはメインアンテナよりも感度が高く、メインビームの軸方向には感度が低くなるように設計されています。メインチャンネルとガードチャンネルで受信した信号を比較し、ガードチャンネルの方が強い場合はサイドローブクラッタとして除去されます。
ガードホーンは、APG-63のような平板型レーダーアンテナではスロットアレイに取り付けられ、全走査方向に良好な補正を行うために一緒に走査される。しかし、N019やN001のようなロシアのカセグレンレーダーでは、ガードホーンは走査反射板に取り付けられておらず、下方向に向けて固定されている。逃げ惑うターゲットをレーダーロックする際に、低空で戦闘機をバンピングすると、補正ホーンが地面から離れて回転し、サイドローブ補正が低下し、グランドクラッタによりロックが解除されてしまいます。サーチモードでの通常のスキャン動作では、レーダーのカセグレンアンテナ筐体全体が回転ジンバルでロールスタビライズされ、地平線との向きが保たれます。このモードでは、戦闘機のロールが回転ジンバルの限界(バンク角110~120度)を超えると、捜索目標をスコープから見失うことがある。MiG-29とSu-27のパイロットは、交戦中の操作高度を慎重に決定する必要があります。なぜなら、高高度はサイドローブのクラッターを減らしてレーダーの性能を最大化する一方で、ルックダウンターゲットがノッチによってロックを解除しやすくなるからです。F-15Cのパイロットは、レーダー性能の制約が少ないため、高度がミサイル性能に与える影響を考慮して、このような判断をすることがあります。
現代の戦闘機には、レーダー・ワーニング・システム(RWS)が装備されている。RWSは、放射しているレーダーシステムの方位と種類を特定する。レーダーシステムの種類を確認した後は、そのレーダーを搭載している兵器システムの種類(またはクラス)を推測することが一般的には安全です。
現代のレーダーは、異なるパルス繰返し周波数(PRF)と異なるスキャンゾーンを持つ、非常に多様なモードで動作することができます。PRFとは、1秒あたりのレーダーパルスの数のこと。PRFを変えることで、異なるアスペクトアングルで飛行するターゲットを検出する際のレーダーの感度を高めることができる。高PRFは自機に向かって飛んでくるターゲット(高アスペクト)を検出するために使用し、中PRFは閉鎖率の低いターゲットや自分が後ろにいるターゲットを検出するために使用します。デフォルトの動作モードでは、レーダーは高PRFと中PRFを循環させ、すべてのターゲットのアスペクトを検出します。これはインターリーブモードと呼ばれています。捜索モードでは、レーダーはワイドスキャンゾーンで動作します。目標追跡モードでは、レーダーは狭いアジマスゾーンで動作する。レーダーは目標をロックオンした後、トラックモードに変更する。
最近のレーダーの多くは、TWS(track while scan)モードを備えている。このモードでは、複数のターゲットを同時に追跡することができる。このモードの最大の利点は、空域の広いゾーンの詳細な情報を提供することである。しかし、スキャンゾーンの外にあるターゲットについては情報が得られない。このモードでは、ターゲットの動きを予測して追跡することが多い。スキャン期間は比較的短いが、高速で機動するターゲットは素早いマヌーバを行ってスキャンゾーンを離れることがある。レーダーディスプレイには、ターゲットの予測された軌跡が表示されます。次の位置の更新は、定義された期間が経過し、トラックファイルが構築された後にのみ行われます。
track while scanモードでは、非常に多くのターゲットに関する詳細な情報が得られます。しかし、このモードではスキャン期間中のターゲットの位置予測が使用されます。ターゲットは予期せぬマヌーバをしてサーベイゾーンを離れることがある。
F-15CのレーダーはAN/APG-63(V)1パルス・ドップラー・レーダーです。レーダーの電源を入れ、【I】を押します。レーダーの情報は、フロントダッシュ左上のVSD(Vertical Situation Indicator)に表示されます。レーダーには、以下のようないくつかのモードがあります。
Long Range Search (LRS) Mode
LRS[2]キーモードは、F-15Cが長距離の捕捉と交戦を行うための主要なレーダーモードです。パイロットは捕捉範囲(10、20、40、80、160海里)を設定し、アジマス幅とエレベーションを変更することができる。レーダー・コンタクトの位置に関する情報は垂直状況ディスプレイ(VSD)に表示されるが、コンタクトの速度、高度、方位に関する情報は提供されない。
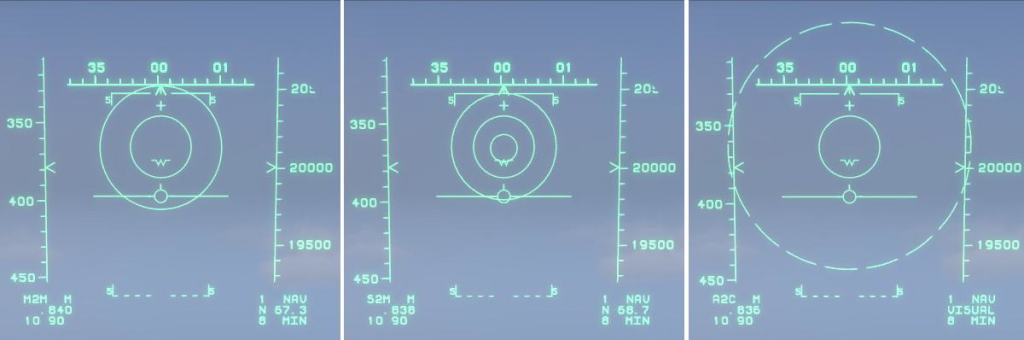
VSDには、自機の上から見たレーダー画像が、選択した距離スケールに合わせて平面図として表示されます。VSD上には、自機からの距離に応じたターゲットコンタクト(ヒットとも呼ばれる)が表示されます。最も近いヒットはVSDの下端に、より遠いものは上端に表示されます。レーダーは最大で16個のターゲットを同時に追跡することができます。また、レーダーはすべてのターゲットに対して敵か味方かの質問(IFF)を自動的に行います。友好的なヒットは丸で、敵対的なヒットは四角で表示されます。
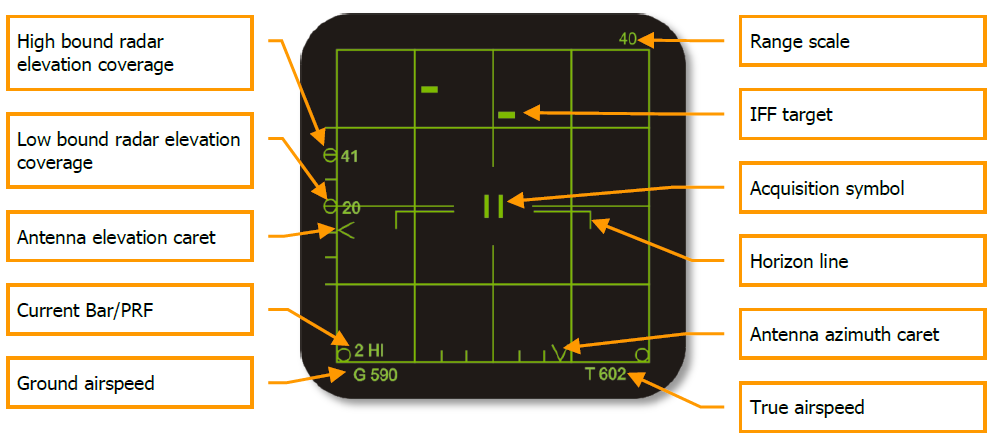
VSDの右上には、現在のレーダーのレンジ設定が表示されます(10、20、40、80、160海里)。
VSDの左側には、レーダーの仰角スキャンエリアが表示されています。小さな円の近くにある数字は、VSD上の現在のレンジにおけるターゲット指定カーソル(TDC)の仰角カバー範囲の上限と下限を示している。レーダーのビームはアンテナから離れるほど大きくなる円錐形なので、TDCの範囲が広がると仰角のカバー範囲も広がります。RShift+;]キーと[RShift+.]キーを使って、レーダーの仰角範囲を上下に60°傾けることができます。それに伴い、標高カバレッジの円が上下に移動します。各バースキャンの角度範囲は2.5度です。TDCをVSDの上限と下限に移動させることで、自動的に範囲を上下に「移動」させることができます。
VSDの下端には、対地速度「G」と真速度「T」の値が表示されます。左下には常に変化するエレベーションバーとPRF(Pulse Repetition Frequency)値が表示されます。PRFはHIとMEDが交互に表示され、異なる方向に飛んでいるターゲットを検出するために必要です。PRFが高い “HI “モードでは、遠く離れた真正面のターゲットを検出することができます。「また、PRFが中程度のモードでは、距離は短くなりますが、クロージャー(Vc)が小さいターゲットの検出に適しています。このモードはインターリーブモードと呼ばれ、ゲーム中のF-15Cの標準的なLRSモードとなっています。RShift + I]でHI、MED、Interleavedを切り替えることができます。
VSDの下部には、選択されたアジマス走査ゾーンの幅を反映した水平方向の目盛りがあります。この幅はデフォルトでは-±600ですが、[RCtrl+-]キーを押すことで-±300を選択することができます。スケールに沿った2つの円は、アンテナのアジマス走査限界を表しており、このゾーンの内側には、アンテナの現在のアジマス位置を表示する動くカレットがあります。600の設定ではスキャンエリアが広くなりますが、±300の設定ではターゲットの更新が速くなります。
レーダーをコンタクトにロックするには、[;]、[,]、[.]、[/]キーを使ってTDCをコンタクトの上に移動させ、[Enter]キーを押します。すべてのロック条件が満たされると、レーダーは自動的にシングルターゲットトラック(STT)モードに移行します。
Single Target Track (STT) Mode
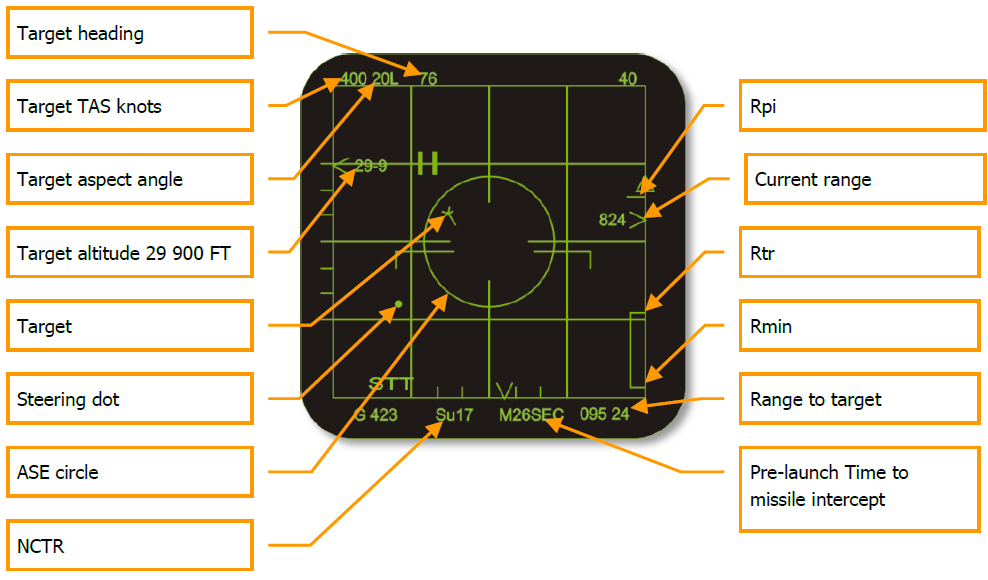
LRSモードからターゲットをロックした後、レーダーはSTTモードに変わります。レーダーは全エネルギーを1つのターゲットに集中させ、常に最新情報を提供するようになりました。しかし、レーダーは他のコンタクトを検知しなくなり、敵はこのレーダーロックによって警告を受ける可能性がある。STTモードのVSDの表示はLRSモードとほぼ同じです。VSDの左下にはSTTインジケーターが表示されます。ロックされたレーダー・ターゲットは星形で表示され、そこからフライト・ベクトル・ラインが出ており、これはそのターゲットが第一指定目標(PDT)であることを示しています。
aim-7を発射するには、近距離でスロットルモードに入るか、フラッドモードに切り替える必要があります。
NCTR(Non-Cooperative Target Recognition)システムは、ロックされたターゲットを自動的に識別(プリント)しようとするシステムである。このシステムは、異なる航空機のレーダー・シグネチャー・サンプルのライブラリをメモリに保存し、ロックされたターゲットとの比較を試みる。シグネチャーの識別方法は、ターゲットの第1段コンプレッサーブレードによって部分的に決定されるレーダーリターンに基づいています。シグネチャがライブラリのエントリと一致した場合、VSDの下部中央付近にターゲットの名前が表示されます。このような方法は、ターゲットの識別成功を100%保証するものではありません。ターゲットのレンジ、高低差、ターゲットのアスペクトなどがNCTRプリントに影響を与える可能性があります。
VSDの左上には、ターゲットのスピード、アスペクト、ヘディングが表示されます。標的の高度は標高スケールに沿って海抜との関係で表示されます。高度が29,900フィートの場合、29-9と表示されます。また、VSDの右下にはターゲットのレンジとコンバインドクロージャーが表示される。
STTモードでは、ミサイルの使用状況が表示され、射撃のタイミングを知ることができます。VSD上の大きな円は、ASE(allowable steering error)の円です。これは、HUDで確認したのと同じ動作をします。円が大きいほど許容操舵誤差が大きくなり、Pk(P sub Kと発音します)の確率が高くなります。ASEの大きさは、選択したミサイル、ターゲットのマヌーバ、ターゲットのアスペクト、スピードなどによって変わる。より高いPkを得るためには、”Center the dot for before taking the shot. “という簡単な韻を踏むようにしましょう。
VSDの右側には、ロックされたターゲットに対する選択された武器のダイナミック・ローンチ・ゾーン(DLZ)を示す垂直方向のスケールが表示されています。目盛りに沿った水平方向のバーが発射の合図となる。下から上に向かって Rmin:最小発射距離、Rtr:高Gターゲットの機動を想定した最大発射距離、Rpi:非機動ターゲットに対する最大発射距離。目盛りの一番上にある三角形はRaeroを表しています。Raeroは、ターゲットに関係なく、ミサイルの最大弾道範囲を象徴している。
目盛りの下、VSDの右下には、目標の方位と目標距離がデジタルで表示される。
VSDの下部には、選択したミサイルが目標に到達するまでの推定時間が表示されます。秒単位の時間は、AIM-120を選択した場合はM、AIM-7を選択した場合はT、AIM-9を選択した場合はSが前に表示される。なお、発射後の情報はHUDにのみ表示されます。
Track While Scan (TWS) Mode
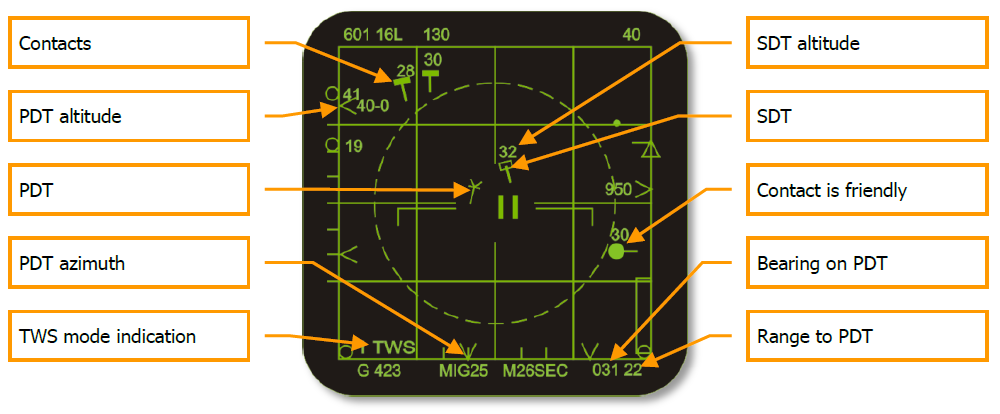
TWSモードは非常に情報量の多いモードですが、LRSよりも複雑です。このモードは、LRSとSTTモードに特有の情報を組み合わせたものです。TWSモードは、LRSとSTTの2つのモードを組み合わせたもので、あるコンタクトの詳細なターゲットデータを持ちながら、他のターゲットをスキャンすることができます。RAlt-I]キーでTWSモードを開始すると、VSDの左下にあるモードインジケータが「TWS」に変わります。通常、TWS VSDの表示はLRS VSDと非常によく似ています。ただし、各コンタクトにはコンタクトのヘディング方向を示すベクターラインが表示され、その横にはデジタルの高度表示があります。
TWSモードでは、複数のターゲットにAIM-120ミサイルを同時発射することができます。
LRSではコンタクトを指定すると、レーダーはSTTモードに移行するが、TWSではコンタクトを最初に指定すると、そのコンタクトをPDT(Primary Designated Target)に設定するが、スキャンエリア内の他のコンタクトを検索して表示し続けることができる。さらに、他のコンタクトを指定することで、そのコンタクトはセカンダリ指定ターゲット(SDT)として設定されます。SDTターゲットは中空の長方形で表示されるのに対し、PDTは星型で表示される(STTモードと同様)。PDTまたはSDTを2回目に指定することで、そのターゲットに対するSTTトラックが開始される。複数のAIM-120ミサイルが一斉に発射された場合、最初のミサイルがPDTに向かい、後続のミサイルが指定された順にSDTを迎撃することになる。迎撃までの時間のタイマーはPDTに関してのものとなる。
TWSモードではAIM-7は発射できません。このようなミサイルを発射するには、ターゲットを2回指定してSTTモードに移行する必要があります。
TWSにはいくつかの制限があります。レーダーはコンタクトごとにトラックファイルを作成しようとしますが、スキャン量が多い場合、スキャンとスキャンの間にはかなりのリフレッシュタイムが発生します。各スキャンの間、レーダーは次のスキャンのために接触者の位置を予測しようとします。しかし、ターゲットが高Gの回避行動をとり、軌道や速度を素早く変化させた場合、レーダーはトラックファイルの予測を誤ることで、トラックを見失う可能性がある。このような防衛戦術をとると、狩る側がすぐに狩られる側になってしまいます。しかし、レーダーはPDTを中心にアジマススキャンを行うようにします。
TWSはAIM-120と組み合わせることで、複数のターゲットを同時に攻撃できる強力な能力を発揮する。しかし、目標追尾の信頼性はLRSよりも低く、STTよりもさらに低い。しかし、STTとは異なり、AIM-120を使用したTWSの発射は、敵機にレーダーロックと発射指示を与えない。そのため、敵機のパイロットが最初に警告を受けるのは、AIM-120のレーダーシーカーがターゲットの近くでアクティブになった時であると考えられる。
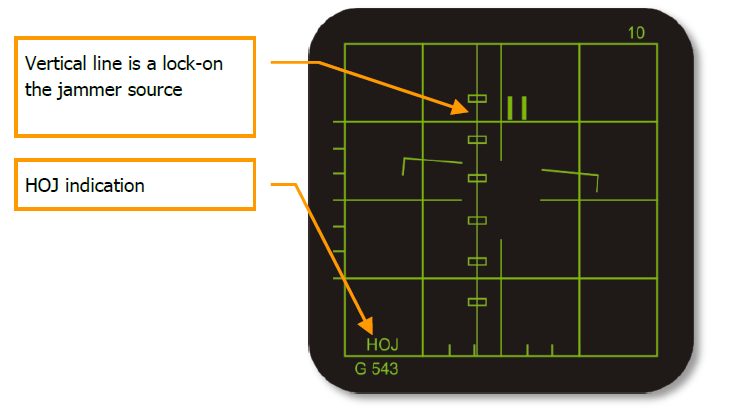
ホームオンジャム(HOJ)モードレーダーとレーダー警告受信機(RWR)がアクティブな電子対抗措置(ECM)を検出すると、VSD上にジャマーの方位に沿って垂直に連続した中空の長方形が表示される。このECM表示はノイズジャマーのもので、ストロボと呼ばれている。そのECMストロボを使ってターゲットをロックするためには、TDCをいずれかの中空の長方形の上に置き、[Enter]キーを押して指定します。レーダー上のターゲットをロックするわけではないので注意が必要です。ECMエミッターがロックされると、一連の長方形には縦の実線が引かれ、その方位に沿ってECMエミッターが配置されます。
VSDはホームオンジャムモードになり、VSDとHUDにHOJインジケーターが表示される。AIM-120とAIM-7Mミサイルは、敵のECMによってレーダーロックができない場合、このモードで発射することができる。ただし、このモードで発射した場合、ミサイルは効率の悪い純粋なパーシュート軌道を描くことになり、キルの確率はかなり低くなる。また、射程距離の情報は提供されないことにも注意してください。そのため、味方のAWACSに連絡して距離情報を得ることをお勧めする。このようなモードで攻撃すると、HOJ攻撃は完全に受動的な攻撃となるため、敵に警告を与えることができません。