Auto ACQuisition (AACQ) Radar Modes
F-15Cは、3種類の短距離レーダー自動捕捉モードを使用することができます。これらのモードは、ACM交戦中に敵機を自動的にレーダーロックするために使用される。これらのモードの最大ロック範囲は10海里です。
自動捕捉モードでは、レーダーは最初に探知した目標に追尾する。
Boresight AACQ Mode
BORESIGHT [4] キーモードは、前方の狭いコーン内のターゲットを自動的にロックすることができます。このモードでは、レーダーの視野は航空機の真正面にあり、外側のレチクルはこのスキャン領域を示しています。レーダーは、FOVに入った最初の目標にロックオンします。
After locking onto the target, the radar changes to STT mode.
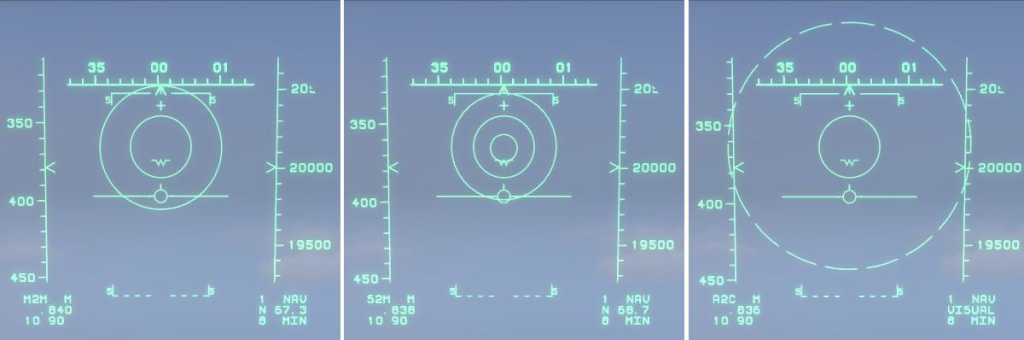
Vertical Scan AACQ Mode
VERTICAL SCAN [3]キーモードでは、自機と同じ垂直面上にあるターゲットをロックアップすることができます。空戦機動(ACM)時に自動的に高Gでターゲットをロックオンすることが可能になります。このモードでは、レーダーは幅7.5度、垂直方向-2~50度の空域をスキャンします。HUDには2本の縦線が表示されます。ターゲットをロックするには、この2本の線の間か、自分の揚力ベクトルに沿ってターゲットを位置づける必要があります。垂直方向の最大スキャン範囲は、HUDの上枠からHUDの高さ2つ分程度の高さです。

After locking onto the target, the radar automatically changes to STT mode.
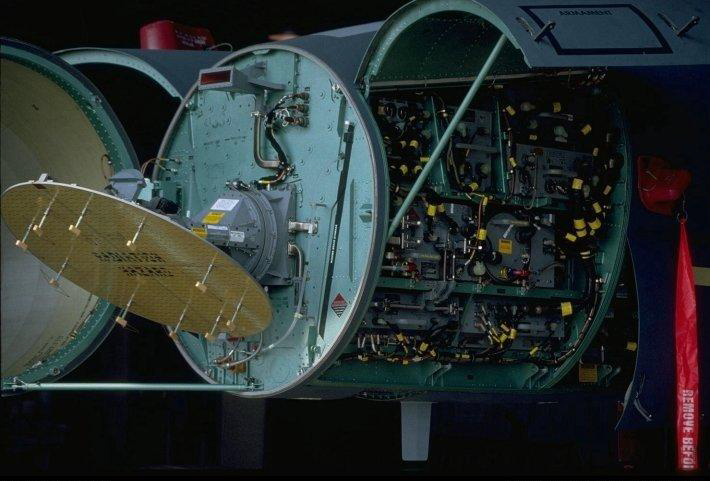
AN/APG-63(V)1 Radar
F-15Cは、3種類の短距離レーダー自動捕捉モードを使用することができます。これらのモードは、ACM交戦中に敵機を自動的にレーダーロックするために使用される。これらのモードの最大ロック範囲は10海里です。
第二次世界大戦以降、「全天候型戦闘機」の特徴は、搭載された航空迎撃レーダーである。電波は雲を透過するため、視覚や赤外線の探知能力を低下させる天候に左右されず、昼夜を問わず空中の標的を探知し、兵器に指示を与えることができる強力なセンサーである。レーダーはまた、非常に長い探知距離を提供することができるため、現代の視覚距離外(BVR)空戦のためのセンサーとして選ばれている。
F-15C戦闘機には、運用期間中、APG-63レーダーのいくつかのバージョンが装備されています。そのほとんどは、機械的に走査された平板スロットアレーアンテナを持つ「Xバンド」(10GHz)レーダーである。MiG-29とSu-27はそれぞれN019とN001レーダーを搭載しており、同じ周波数帯で作動するが、以前のソビエト戦闘機のものと同様のツインリフレクター「ツイスト・カセグレン」アンテナを採用している。
これらの迎撃レーダーの特性と限界は、空中戦のBVRフェーズで採用される戦術を大きく左右する。多くの詳細はまだ秘密であるが、BVR戦闘のダイナミクスを理解するのに十分な情報が得られており、それぞれの敵が相手のハードウェアの制限を利用することで優位に立とうとする様子がうかがえる。
レーダーは、電波を細いビームに絞って空間に送信し、ターゲットから反射してきた信号を受信することで作動する。この集束はレーダーアンテナによって行われ、ビームの細さがレーダーの最大探知距離や目標物の分解能に影響する。省スペースで最大の集束力を持つアンテナを戦闘機に搭載するため、1つのアンテナをパルスモードで使用し、時分割で送信と受信を1秒間に数千回高速に切り替えている。この変調パルス繰り返し周波数(PRF)は、電波そのものの動作周波数(Xバンドなど)とは異なる。
ベトナム戦争で、北ベトナムの戦闘機は、パルスレーダーを装備したアメリカの戦闘機から姿を隠すために、低空飛行をすることを覚えた。相手より低い高度を飛ぶことで、敵のレーダーアンテナを地球に対して下向きにする必要があったのだ。この「見下ろし型」では、目標から反射されたレーダー信号は、周囲の背景である地球からの反射にかき消され、レーダーによる目標の探知や追跡は事実上不可能であった。ルックダウン方式による防御上の利点は、F-111やトルネードなど、超低空で安全に防空網を突破するために設計されたNATOの攻撃機の全世代を生みだした。
APG-63(V)1、N019、N001のような最新のパルス・ドップラーレーダーは、安定したコヒーレント発振器を採用し、複数の反射信号を統合して周波数の小さな変化を検出することができる。ドップラー効果により、航空目標に接近・後退する反射信号は、地球からの反射信号とは異なる周波数シフトを示す。このため、パルス・ドップラーレーダーは、高度に関係なくほとんどの航空目標を探知、追尾、交戦できる「ルックダウン/シュートダウン」機能を備えている。ソ連軍のMiG-29の登場により、NATOのドクトリンは低空侵入から「ステルス」「マルチロール」戦闘機へと変化していった。
パルスドップラーレーダーは、地球を背景に低空目標を識別するために、「クロージャー」(目標接近速度)に依存する。防御側の航空機は、敵のレーダービームに垂直な軌道を飛行する「ビーミング」または「ノッチ飛行」と呼ばれる戦術によって、パルスドップラーレーダーのロックを解除できることが多い。防御側のパイロットは、航空機のレーダー警報受信機(RWR)のディスプレイで脅威のレーダーを観察し、その脅威を「3時」または「9時」の位置に配置するように飛行する。防衛用パイロットは脅威に向かっても遠ざかってもおらず、ルックダウンジオメトリでは周囲の地形、ルックアップジオメトリでは展開されたチャフ対策と同じように閉じた状態で飛行している。64p
レーダーは、周囲の地形の変化により、レーダービームの軸に沿って反射した信号(クラッタ)を受信するため、レーダーの感度に一次的な「ノッチ」が発生します。この「ルックダウンクラッターノッチ」内の目標信号は、あたかも地上のクラッターであるかのようにフィルタリングにより拒否され、ビームを照射した目標がレーダーロックを解除することができる。しかし、アンテナの集束は完全ではないので、送信されたエネルギーの一部はサイドローブと呼ばれる意図しない方向にこぼれ落ちてしまう。このエネルギーは地面で反射され、サイドローブ方向から再びアンテナに入射することもある。戦闘機が低高度を飛行している場合、地面から反射した信号がレーダーに入り、戦闘機の上昇率や下降率に等しい距離で、追加のクラッタとしてスコープに表示されることがあります。戦闘機が同じ速度と距離で逃げる目標に対して追撃している場合、目標の信号がサイドローブ・クラッターに紛れ込み、ロックが解除されることがあります。これは戦闘機のレーダー感度に二次的な “ノッチ “を生じさせる可能性があります。
サイドローブ・クラッターは通常、小型の「ガード」ホーンアンテナの助けを借りてフィルタリング(「補正」)されます。ガードアンテナは、サイドローブ方向にはメインアンテナより感度が高く、メインビームの軸方向には感度が低くなるように設計されています。主チャンネルとガードチャンネルで受信した信号を比較し、ガードチャンネルの方が強い場合はサイドローブ・クラッタとして除去されます。
APG-63のような平板型レーダーアンテナでは、ガードホーンはスロットアレイに取り付けられ、全走査方向に良好な補正を行うために一緒に走査されます。しかし、N019やN001のようなロシアのカセグレンレーダーでは、ガードホーンは走査反射板に取り付けられておらず、固定されて下方向に向けられている。逃走中の目標にレーダーロックする際、低空で戦闘機をバンクさせると、補償ホーンが地面から離れ、サイドローブ補償が劣化し、地面クラッタのためにロックが解除されることがあります。サーチモードでの通常のスキャン動作では、レーダーカセグレンアンテナハウジング全体が回転ジンバルでロールスタビライズされ、水平線との方向が保たれます。このモードでは、戦闘機のロールが回転ジンバルの限界(バンク角110~120度)を超えると、スコープから捜索目標を見失うことがあります。MiG-29とSu-27のパイロットは、交戦中の操作高度について慎重に判断する必要があります。高高度はサイドローブ・クラッタを減少させてレーダー性能を最大化しますが、ルックダウン目標がノッチによってより容易にロックを解除できるためです。F-15Cのパイロットはレーダー性能の制約が少ないので、高度がミサイル性能に与える影響を考慮して判断することができる。
現代の戦闘機には、レーダー警報装置(RWS)が装備されている。RWSは、放射しているレーダーシステムの方位と種類を特定する。レーダーシステムの種類を特定した上で、そのレーダーを搭載している兵器システムの種類(クラス)を推測することは、一般的に安全である。
現代のレーダーは、異なるパルス繰り返し周波数(PRF)と異なるスキャンゾーンで、非常に多様なモードで動作することができます。PRFとは、1秒間に何回レーダーパルスが発射されるかを示す数値である。PRFを変えることで、異なるアスペクト角で飛行する目標を探知する際のレーダーの感度を上げることができます。高 PRF は自機に向かって飛んでくる目標(高アスペクト)を探知するときに使用し、中 PRF は接近率の低い目標や後方にいる目標に使用します。デフォルトの動作モードでは、レーダーは高 PRF と中 PRF の間を循環して、すべての目標アスペクトの検出を行います。これは、インターリーブモードと呼ばれます。サーチモードでは、レーダーは広いスキャンゾーンで動作します。この場合、レーダーは広いスキャンゾーンで動作し、目標追跡モードでは、狭いアジマス ゾーンで動作します。また、ターゲットロックオン後、追尾モードに移行する。
最近のレーダーの多くは、TWS(Track While Scan)モードを備えている。これは、複数のターゲットを同時に追跡することができます。このモードの主な利点は、空域の広いゾーンの詳細な情報を提供することです。しかし、スキャンゾーンの外側のターゲットについての情報は提供されない。このモードでのターゲットの動きは、しばしば予測によって追跡される。スキャン周期は比較的短いのですが、高速で移動するターゲットは素早い操作を行い、スキャンゾーンを離れることがあります。レーダーディスプレイには、ターゲットの予測された軌道が表示されます。位置の次の更新は、定義された期間が経過し、トラックファイルが構築された後に行われます。
トラックウィズスキャンモードでは、非常に多くのターゲットに関する詳細な情報があります。しかし、このモードでは、スキャン期間中のターゲットの位置予測は使用されません。ターゲットは、予期しないマヌーバを行うことで、サーベイゾーンから外れることがあります。
このシミュレーションでは、F-15CのレーダーはAN/APG-63(V)1パルスドップラーレーダーです。レーダーをオンにし、[I]キーを押します。レーダー情報は、フロントダッシュ左上のVSD(Vertical Situation Indicator)に表示されます。レーダーには、以下のようないくつかのモードがあります。
Long Range Search (LRS) Mode
LRS [2]キーモードは、F-15Cの長距離捕捉と交戦のための主要レーダーモードです。パイロットは捕捉範囲(10、20、40、80、160海里)を設定し、方位幅と仰角を変更することができます。レーダーコンタクト位置に関する情報は垂直方向状況表示(VSD)に表示されるが、コンタクトの速度、高度、方位に関する情報は提供されない。
VSDは、レーダー画像を自機上空からの平面図として表示し、選択した距離目盛りに合わせて表示します。ターゲットコンタクト(ヒット)は、自機からの距離に応じて VSD 上に配置されます。最も近いヒットは VSD の下端に、より遠いヒットは上端に配置されます。レーダーは最大 16 個のターゲットを同時に追尾することができます。また、レーダーは全てのターゲットを自動的にIFF(Friend or Foe)で照会します。友好的なヒットは丸で、敵対的なヒットは長方形で表示されます。
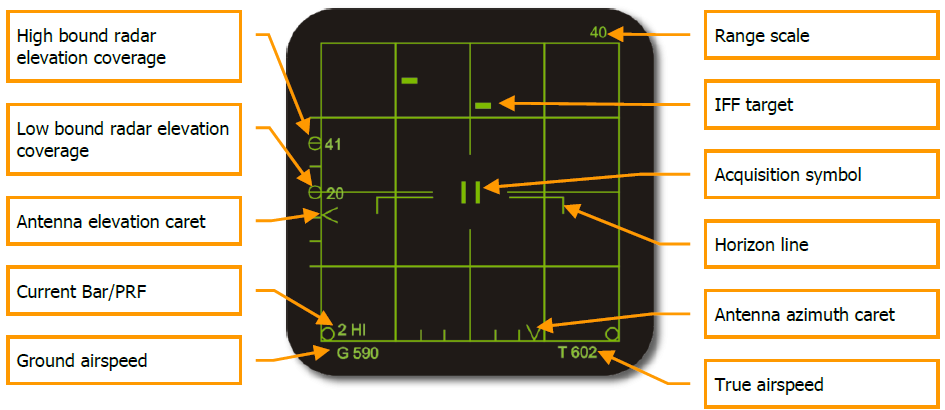
VSD の右上には、現在のレーダーレンジの設定値(10、20、40、80、160 海里)が表示されます。
VSD の左側には、レーダーの標高走査範囲が表示されます。小さな丸に近い数字は、VSD上の現在のレンジにおけるターゲット指定カーソル(TDC)の標高カバー限界の高さと低さを示しています。レーダービームはアンテナから離れるほど大きくなる円錐形なので、TDCのレンジが大きくなると、仰角のカバー範囲は広がります。RShift+;」と「RShift+.」キーでレーダーの標高範囲を上下に60度傾けることができます。それに伴い、標高範囲円も上下に移動します。
バースキャンの各角度範囲は2.5度です。TDCをVSDの上限と下限に移動させることで、自動的に範囲を上下に “バンプ “させることができます。
VSDの下端には対地速度 “G “と真の速度 “T “の値が表示されます。左下には常に変化するエレベーションバーとパルス繰り返し周波数(PRF)値が表示されます。PRFはHI-MEDを交互に表示することで、異なる方向から飛んでくるターゲットを検出することができます。PRFの高い “HI “モードでは、遠く離れた真正面のターゲットを検出することができます。「MED」Medium PRFは、飛距離が短くなりますが、接近度(Vc)の低いターゲットを検出するのに適しています。これはインターリーブモードと呼ばれ、ゲーム中のF-15Cの標準的なLRSモードです。RShift + I]を押すことで、HI、MED、インターリーブの間を切り替えることができます。
VSD の下部には水平スケールがあり、選択したアジマススキャンニングゾーンの幅が反映されます。デフォルトでは-±600ですが、[RCtrl+-]キーを押すことで-±300を選択することができます。目盛りに沿った2つの円はアンテナのアジマス走査限界を表し、このゾーンの内側にはアンテナの現在のアジマス位置を表示する移動キャレットがあります。600に設定するとスキャン範囲が広くなり、±300に設定するとターゲットの更新が速くなります。
レーダーをコンタクトにロックするには、[;], [,], […], [/] キーでTDCをコンタクト上に移動させ、[Enter] キーを押してください。すべてのロック条件が満たされると、レーダーは自動的に単一目標追跡(STT)モードに移行します。
Single Target Track (STT) Mode
LRSモードからターゲットをロックした後、レーダーはSTTモードに切り替わります。このとき、レーダーは全エネルギーを単一の目標に集中させ、常に更新を行います。ただし、レーダーは他のコンタクトを検出しなくなり、このレーダーロックによって敵に警戒されることがあります。STT モードでの VSD 表示は、LRS モードとほとんど変わりません。STT インジケータは VSD の左下に表示されます。ロックされたレーダーターゲットは星形で表示され、そこから飛行ベクトル線が伸びており、プライマリ指定ターゲット(PDT)であることを示しています。
AIM-7を起動するには、近距離でSTTモードに入るか、フラッドモードをオンにする必要があります。
非協力的ターゲット認識(NCTR)システムは、ロックされたターゲットを自動的に識別(印刷)しようとします。システムは、異なる航空機のレーダー信号サンプルのライブラリをメモリに格納し、ロックされたターゲットと比較しようとします。シグネチャーの識別方法は、レーダーリターンから、ターゲットの1段目のコンプレッサーブレードによって部分的に決定されます。シグネチャがライブラリのエントリーと一致した場合、VSDの中央下付近にターゲットの名前が表示されます。この方法では、ターゲットの識別を100%保証するものではありません。ターゲットレンジ、標高差、ターゲットアスペクトはすべてNCTRプリントに影響を与えます。
BELSIMTEK
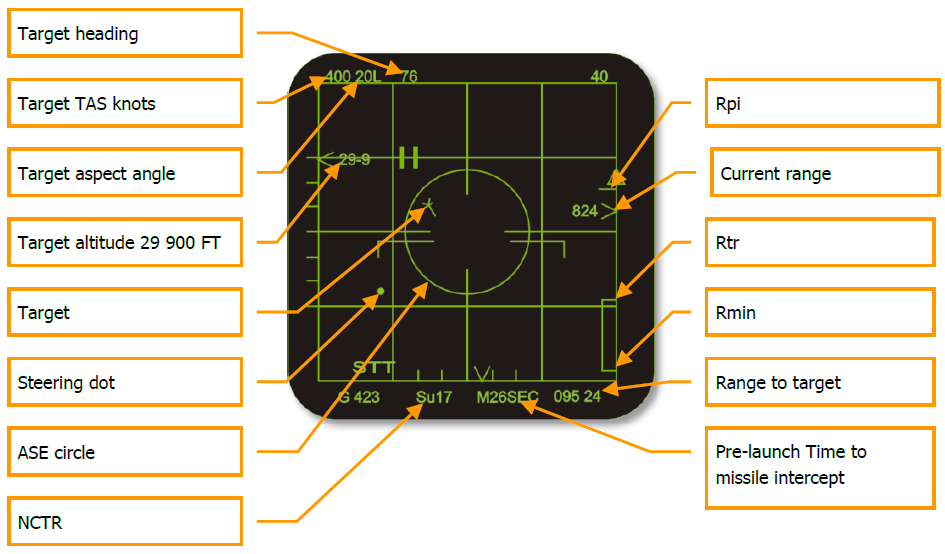
VSD の左上には、目標の速度、アスペクト角、方位が表示されます。
また、標高は海抜高度を基準に表示されます。高度が29,900フィートの場合、29-9と表示されます。また、VSD の右下には目標距離と複合閉鎖が表示されます。
また、STTモードでは、ミサイル発射のタイミングを知らせるミサイル発射データが提供されます。VSD上の大きな円は、ASE(Allable Steering Error)サークルです。これはHUDで確認したのと同じように操作します。
円が大きければ大きいほど、許容操舵誤差とPk(Probability of Kill、発音はPサブK)が大きいことを意味します。
ASEの大きさは、選択したミサイル、ターゲットマヌーバ、ターゲットのアスペクト、スピードなどに依存します。
より高いPkを確保するためには、”Center the dot for before taking the shot “という簡単な韻文を覚えておくとよいでしょう。VSD の右側には、ロックされたターゲットに対する選択した武器の DLZ (Dynamic Launch Zone) を示す垂直スケールが表示されま す。水平方向のバーが発射の合図となります。
下から上へ。Rmin – 最小射程、Rtr – 高Gの標的を想定した最大射程、Rpi – 非機動的な標的に対する最大射程。スケールの一番上にある三角形は、Raeroを表しています。Raeroは、ターゲットに関係なく、ミサイルの最大弾道距離を象徴しています。
目盛りの下、VSDの右下には、目標の方位と射程距離をデジタル表示します。
VSD の下部には、選択したミサイルが目標に到達するまでの推定時間が表示される。AIM-120 の場合は M、AIM-7 の場合は T、AIM-9 の場合は S が表示され、秒単位で表示されます。
なお、発射後の情報はHUDにのみ表示されます。
Track While Scan (TWS) Mode
TWSモードは非常に情報量の多いモードですが、LRSより複雑です。このモードは、LRS モードと STT モードに固有の情報を組み合わせたものです。このモードでは、コンタクトの詳細なターゲットデータを持ちながら、他のターゲットをスキャンすることができます。
RAlt-I] キーで TWS モードを開始すると、VSD の左下隅のモードインジケータが “TWS” に変化します。一般的に、TWS VSD の表示は LRS VSD と非常によく似ています。
ただし、各コンタクトにはコンタクトのヘディング方向を指すベクトル線とその横にデジタル高度表示があります。
TWSモードでは、複数の目標に対してAIM-120ミサイルを同時発射することができます。
コンタクトを指定すると STT モードに移行する LRS とは異なり、TWS では最初にコンタクトを指定すると、そのコンタクトをプライマリ指定ターゲット(PDT)とし、スキャンエリア内で追加のコンタクトを検索して表示し続け ます。さらに、他の接点を指定することで、二次指定ターゲット(SDT)として設定される。
SDTターゲットは中空の長方形で表示され、PDTは星形で表示される(STTモードと同様)。PDTまたはSDTを2回目に指定することで、その目標に対するSTTの追尾が開始されます。
複数のAIM-120をボレー発射した場合、最初のミサイルがPDTに向かい、後続のミサイルは指定された順にSDTを迎撃します。迎撃までの時間タイマーはPDTを基準とする。

twsモードでは、aim-7を発射できません。このようなミサイルを発射するには、ターゲットを2回指定し、STTモードに移行する必要があります。
TWSにはいくつかの制約があります。レーダーはコンタクトごとにトラックファイルを構築しようとしますが、スキャン量が多い場合、スキャンとスキャンの間にかなりのリフレッシュ時間が発生します。各スキャン中、レーダーは次のスキャンのためにコンタクトの位置を予測しようとします。しかし、ターゲットが回避的な高Gマヌーバを行い、軌道と速度を急速に変化させた場合、レーダーはトラックファイルの予測を誤り、トラックを見失うことがあります。このような防衛策をとると、狩る側が狩られる側になる可能性があります。しかし、レーダーはPDTにアジマス・スキャンを集中させようとします。
TWSは、AIM-120と組み合わせることで、複数の目標を同時に攻撃する強力な能力を提供する。しかし、目標追尾の信頼性はLRSより低く、STTよりもさらに低い。しかし、STTとは異なり、AIM-120によるTWSの発射は、敵機にレーダーロックと発射の指示を与えることはありません。そのため、敵のパイロットが最初に受ける警告は、AIM-120のアクティブ・レーダー・シーカーが目標近くでアクティブになった時であろう。
Home On Jam (HOJ) Mode
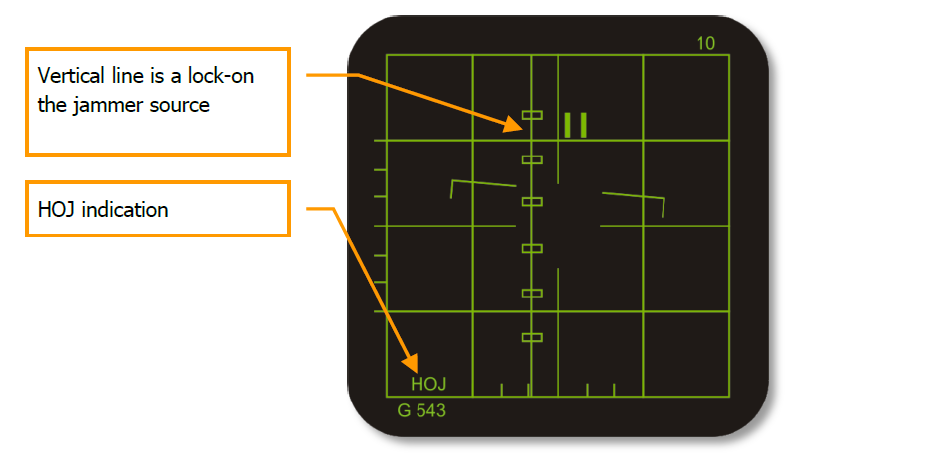
レーダーとレーダー警報受信機(RWR)がアクティブな電子対抗措置(ECM)を検出すると、VSD上にジャマーの方位に沿って縦に連続した空洞の長方形が表示されます。
このECM表示はノイズジャマーのものであり、ストロボと呼ばれる。
このECMストロボを使用してターゲットをロックするには、TDCをいずれかの空洞の長方形に合わせ、[Enter]キーで指定します。レーダーでターゲットをロックしているのではないことに注意してください。ECMエミッタがロックされると、一連の長方形に縦に実線が引かれ、ECMエミッタはその方位に沿っています。
VSDはホームオンジャムモードになり、VSDとHUDにHOJインジケータが表示される。AIM-120とAIM-7Mは、敵のECMによりレーダーロックができない場合、このモードで発射することができる。このモードで発射された場合、ミサイルは効率の悪い純粋な追撃軌道を飛行し、キルの確率はかなり低くなることに注意。また、射程距離の情報は提供されないので注意。そのため、味方のAWACSに連絡して測距情報を得ることが推奨される。HOJ攻撃は完全に受動的な攻撃であるため、このようなモードでの攻撃は敵に何の警告も与えない。
連絡先 PDT高度 PDT方位 TWSモード表示 SDT高度 SDTコンタクトは友好的 PDTに対する方位 PDTまでの距離
Hojモードはターゲットの方位を提供しますが、レンジ、アスペクト、スピード、高度に関するターゲットデータを提供しません。
短距離では、レーダーのエネルギーがノイズジャマーのエネルギー出力に打ち勝ち、レーダーはターゲットから十分なレーダー反射エネルギーを得て、軌道を形成することができます。これは “バーンスルー “と呼ばれます。バーンスルーでは、事前の指定モード(LRSまたはTWS)に関係なく、レーダーは自動的にSTTモードに移行する。ECMバーンスルーは、通常15~23海里です。