Mode KeyMap

Sensors Key Map

Basic F-15C HUD Symbols
HUDの動作モードで変更されないHUDシンボルのセットがあります。

HUDの中央には、航空機の長手方向の位置を示す航空機データム “W “が固定されています。航空機の全速度ベクトル(飛行経路マーカー)はHUDの中にありますが、航空機の操縦に応じて移動することができます。これは、現在の航空機の飛行経路を示します。
現在のヘディングスケールはHUDの上部に配置されています。目盛りに沿って反転したキャレットが、航空機の現在の方位を示しています。例えば、04は40度に対応しています)。
HUDの左側に配置されている対気速度目盛は、表示されている対気速度をノットで表示しています。150ノット未満は表示しない。目盛り上のキャレットの位置は、航空機の現在の速度を示しています。
高度目盛では、HUDの右側に沿って、絶対高度(気圧)がフィートで表示されます。 目盛り上のキャレット位置は、航空機の現在の高度を示しています
HUDの左側にある速度目盛は、航空機の誘導対気速度(IAS)を示します。側面のキ ャレットは、目盛りに対する現在の対気速度を示しています。
Pitch scale.ピッチ目盛は、HUDの中央部にあり、速度ベクトル表示器と連動しています。目盛りは5度ずつ目盛りがついています。 目盛りは、バンク方向に応じて右または左に移動し、機体のバンク方向とその値を示します。実際には、ADIのバンクインジケーターをバック
ア ップしています。
Gun cross. ガングロスは、HUDの中央上部にある固定の十字で、内部のガンに合わせて配置されています。
Current and max.HUD の左下には、現在の G 負荷(小数点を挟んだ 2 桁の数値)と最大許容 G が表示されます。
Navigation Mode
Navigation ModeHUDナビゲーションモードでは、各種情報が表示されます。メインナビゲーションモードでは(NAV)では、選択したウェイポイントへの方向をHUDに表示します。
着陸モード(ILSN)では、着陸に必要な情報を提供します。Navigation Mode (NAV) ナビモードでは、選択したウェイポイントへの操舵指示が表示されます。主要なインジケータに加えて、追加のインジケータがHUDに表示されます。
これらには以下が含まれます。
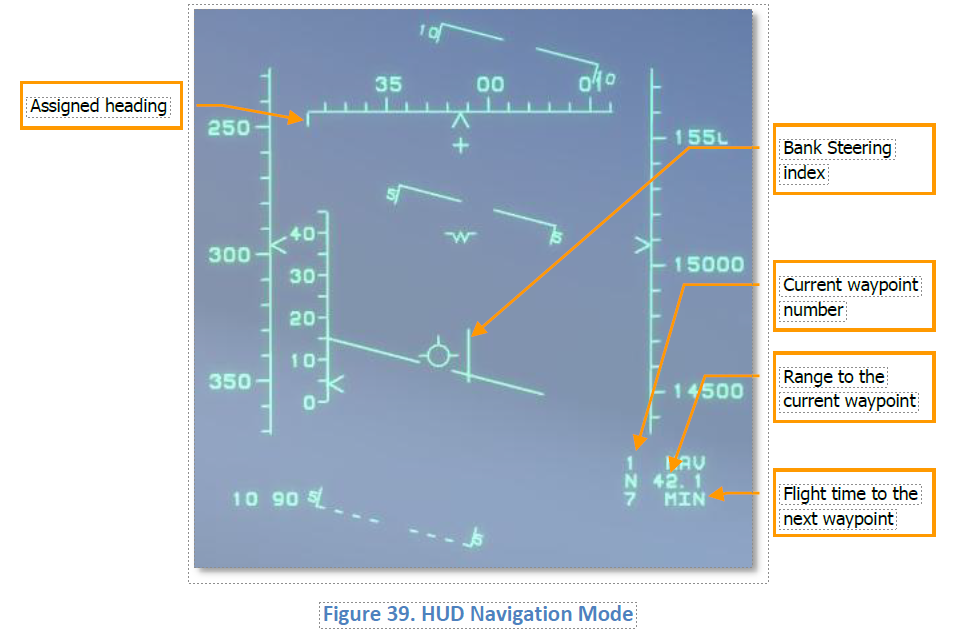
バンクステアリングインデックスは、HUD上を左右に移動できる垂直線で、選択したウェイ ポイントへのコースステアリングを提供します。 ステアリングインデックスがHUDの中央に位置するように機体を回転させて、コースラインに沿って選択されたウェイポイン ヘディングスケール上に割り当てられたヘディングマークは、ヘディングスケール中央の現在のヘディングマークと一致していれば、選択されたウェイポイントへのダイレクトステ アリングを提供します。
ナビ HUD の右下には、現在のナビモードと選択されているウェイポ イント番号が表示されます。(1 ナビ)
HUDモード表示の下には、選択したウェイポイン トまでの距離が海里単位で表示されます。(N 42.1)
このデータブロックの下部には、選択したウェイポイントに到達するまでの時間が表示されます(現在の速度が維持されている場合)。(7 MIN)
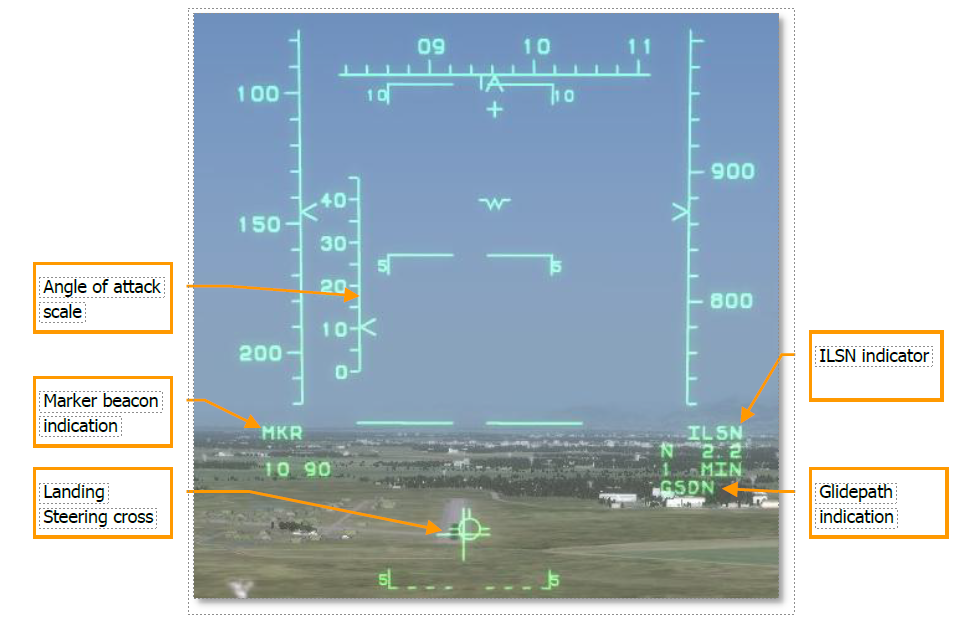
計器着陸システムナビゲーション(ILSNILSN モードでは、追加のインジケータが表示されます。
HUD右下にはILSNインデックスが表示され、現在のモードとウェイポイント番号を知らせてくれます。
HUDの右下、次のウェイポイントまでの時間表示の下には、グライドパス表示があります。機体が適切なグライドパス以下であればGSUP、適切なグライドパス以上であればGSDNと表示されます。
高度 1,000 フィート未満の高度では、HUD の右側にレーダー高度計の目盛りが数百フィート 単位で表示されます。現在のレーダー高度計のバーは、この目盛りの左側に沿って移動します。
速度目盛のすぐ右側には、より小さなAoA目盛が表示されています。この目盛りは現在のAoAを表示しており、度数ではなく単位で測定されます。約 22 単位で着陸してください。
着陸時の適切なバンクとピッチ角は、ランディングステアリングの十字マークが案内してくれます。着陸ステアリングクロス上の速度ベクトルが揃うように飛行して、安全にアプロ ーチしてください。
Gunnery Modes
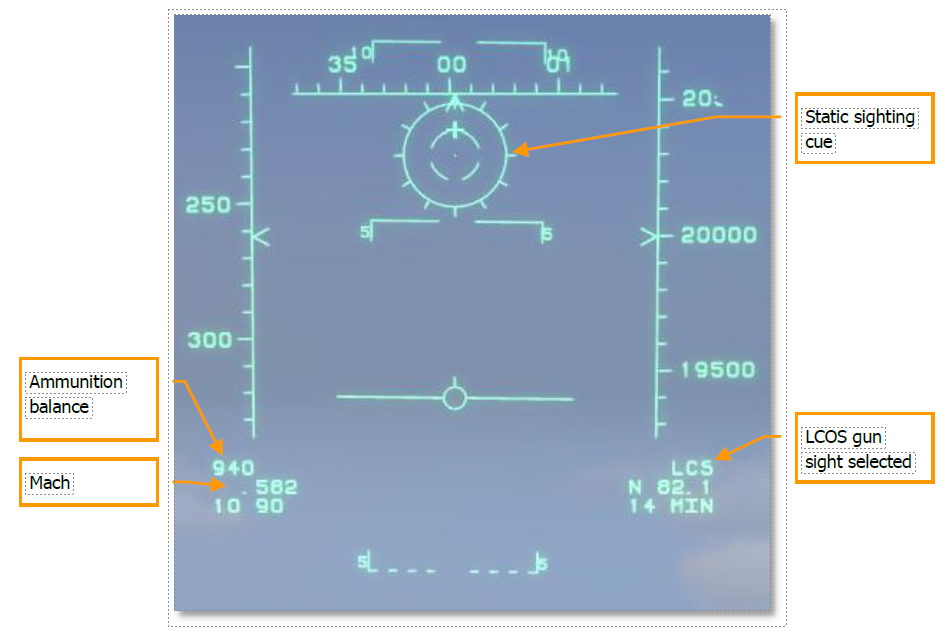
砲撃モードには2つのモードがあり、1つはレーダーロックを必要とするもの、もう1つは必要としないものである。レーダーロックなしでの砲の使用M-61砲を選択するには、まずターゲットをロックせずに[C]キーを押します。この場合、HUDには以下の情報が表示されます。
砲の十字架の下には、同心円で囲まれたピッパードットのような静的な照準の手がかりが表示されている。
キャノンの残弾数は、HUD左下のデータブロックの上部に表示される。 例えば 940 と表示されているのは、PGU-38 の残弾数が 940 発であることを意味する。
弾薬残量表示の下には、現在の機体のマッハ数が表示されます。
BELSIMTEK
1- を押してレーダーをオンにします。[I]
2- を押して銃を有効にする [C]
静的照準キュー内にターゲットを配置するために飛ぶ。
Gun Director Sight (GDS)
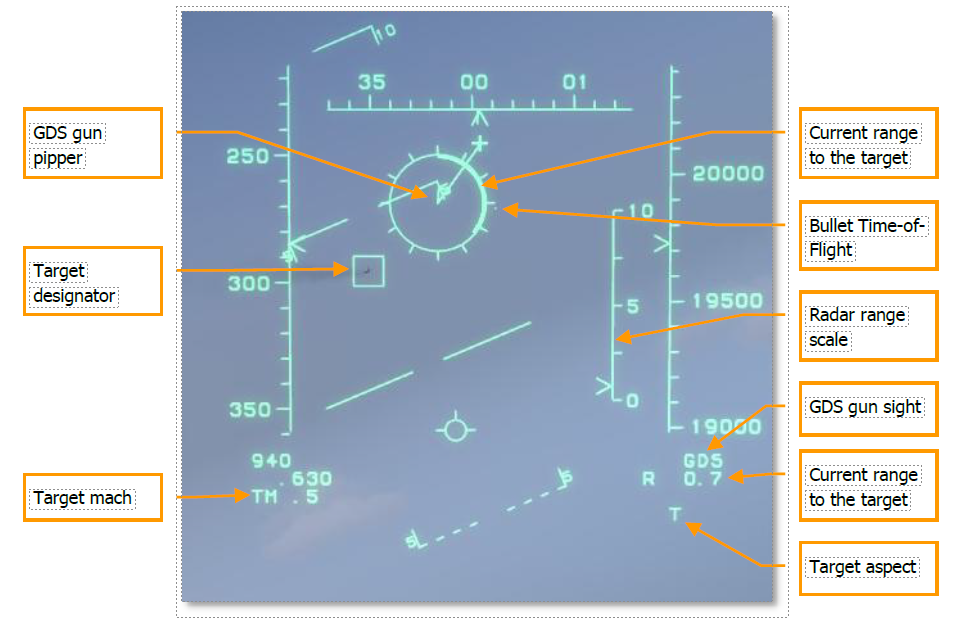
レーダーでターゲットがロックオンされていて、Gun が選択されている場合、HUD は GDS モードになります。 GDSのHUDに表示されます。
ロックされたレーダーターゲットの周囲には、HUDフィールドにロックされたターゲットの位置を示すターゲット指定(TD)ボックスが表示されます。ロックされた目標の上にガンピッパーを置くと、TDボックスは取り除かれます。
HUDの右側には、ターゲットレンジの目盛りが表示されています。スケールはゼロから10海里までの範囲である。垂直方向にスライドするキャレットは、ターゲットまでの現在の射程距離を表示します。GDSガンピッパーは、砲弾が目標弾道と交差する点を示す。砲弾がターゲットに命中するためには、ピッパーをターゲットの上に置く必要があります。
GDS の内接円は、目標までの射程距離を示しています。各目盛りの目盛りは1,000フィートに対応しています。ターゲットまでの射程距離が減少すると、射程距離目盛は反時計回りに巻き戻されます。また、銃の有効射程距離を示す弾着時間ドットもあります。
HUD の右下には、デジタル表示のターゲットまでのレンジがあります。レンジ値は、R記号の後に数字で表示されます。
ターゲットアスペクト表示は、現在のレンジデジタル表示の下にあります。これは、ターゲットの縦軸と照準線からの角度を表示します。ターゲットがテールオンの場合はT(Tail)シンボル、ヘッドオンの場合はH(Head)シンボルが表示されます。デジタル値のRとLの記号は、ターゲットの左右のアスペクトに対応しています。
HUD左下には、ターゲットがロックされている場合、選択した武器の弾薬レベル、自機のマッハ、ターゲットのマッハ(TM)の3つのデータ項目が表示されます。
追求コースのターゲットを攻撃すると、ヒットの可能性が高まります。
AIM-9M/P Sidewinder “Air-to-Air” Short Range Missile (SRM)
Modes以下のセクションでは、AIM-9M サイドワインダーを使用する際に使用する HUD モードについて説明する。 ミサイルの赤外線ホーミング(IRH)シーカーはレーダーとは独立して動作する。シーカーはレーダーロックの有無に関わらず、目標にロックすることができる。 発射後、ミサイルは発射機の支援を必要としない。 まさに “発射して忘れる “のです。
Cage Mode (Non-Scan)
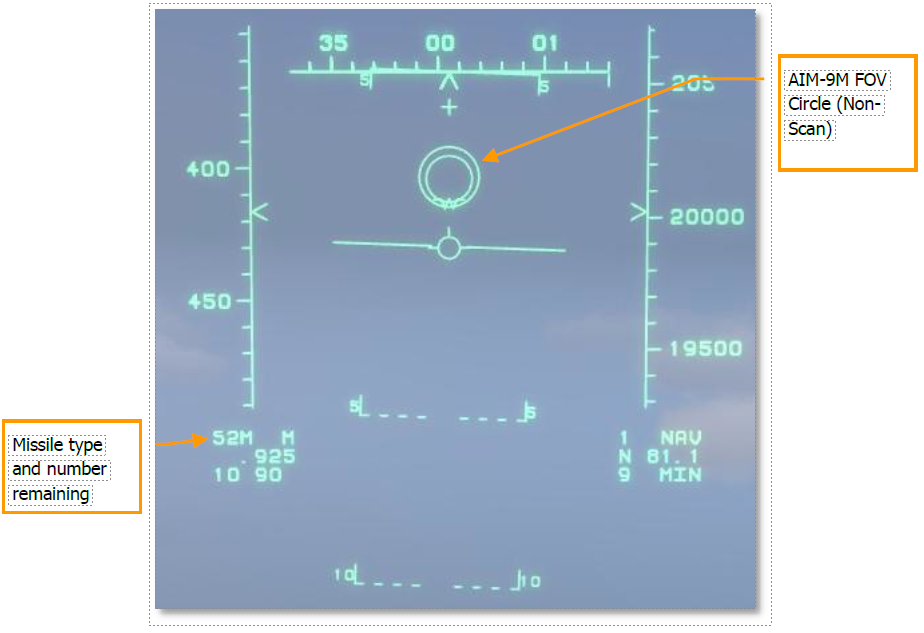
IRHシーカーだけでターゲットをロックするには、[6]キーを押してシーカーをケージに入れます。ケージした後、[D]キーを押してAIM-9Мミサイルを選択する。 選択されるとHUDに “S “と表示されます。 S “の後に残りのミサイルの数が表示され、その後、ミサイルの機種が表示されます。
例:AIM-9Mが2機の場合はS2Mと表示されます。HUD中央にレティクルが表示されます。シーカーヘッドの位置は、このレティキュール内で機体の長手方向軸に沿って剛直に整列している。 ターゲットがレティキュールの範囲内にあり、背景とのコントラストが十分であれば、ターゲットにロックオンすることができます。 しかし、ターゲットがレティキュールの外に出てしまった場合は、ロックを失うことになります。
ケージに入っているときは、たとえロックされていても、シーカーはレティキュールの外のターゲットを追いかけることはありません。 このモードは、狭いグループの中で特定のターゲットをロックするのに便利です。
Uncaged Mode (Scan Selected)
Uncaged Mode (Scan Selected) 6】キーを押すと、ケージドモードとアン ケージドモードが切り替わります。 この設定はMPCDに表示されます。 ケージされていない(箱に入っていない)場合、直径の異なる2つの網状体が表示されます。直径の大きい方の網状体はミサイルの視野を表し、小さい方の網状体はシーカーが現在見ている場所を表します。
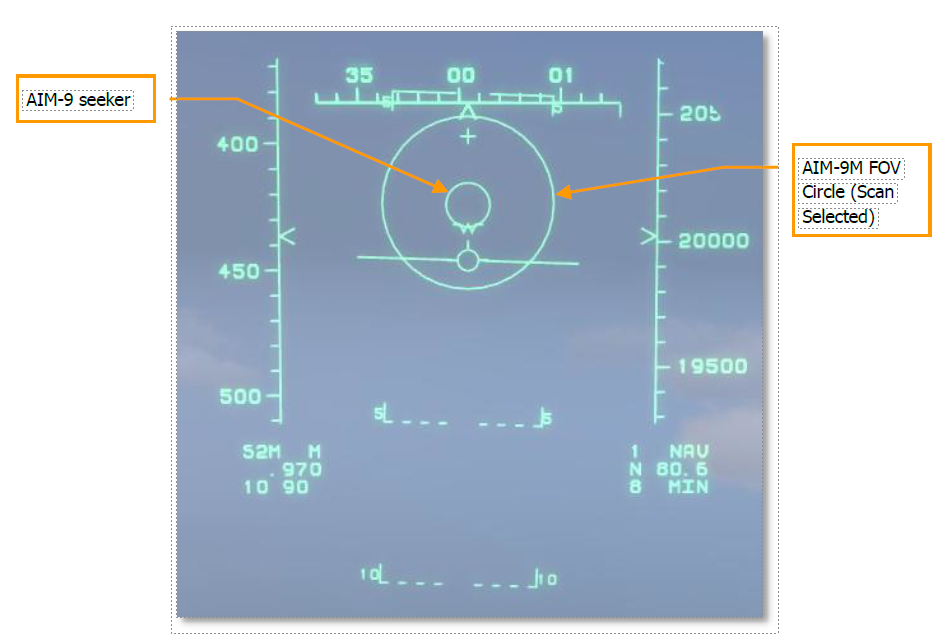
外側のレティキュールのサイズは常に固定されています。このレティキュールは、ミサイルシーカーがターゲットをロックすると消えます。一旦ロックされると、小さいレティキュールはターゲットをフレーミングし、HUD上のシーカーのジンバル限界内でターゲットを追従します。 ミサイルシーカーがターゲットを追跡し始めると、パイロットは高音のロック音を聞く。
IRHシーカーを介して目標をロックすることは、ステルス攻撃のための良い戦術です(発光は敵のRWSシステムによって拾うことができません)。 敵は後方半球からの攻撃を察知する可能性は低く、それに応じて防御手段を講じることはないだろう。
Radar-Slaved Mode
Vertical Scan [3] または Boresight [4] 空中戦闘マニューバ(ACM)モードでは、IRH シーカーのレーダーロック・スレイビングを含めることで、HUD上に追加のターゲッ ト情報が表示される。 目標までの距離が 12,000 フィート以上(AIM-9M ミサイル有効射程外)の場合、以下の記号と表示がHUD に表示される。
ASE 円は操舵誤差角の最大値を示します。ステアリングエラーの値は、ステアリングドットの ASE サークル中心からの偏差に比例します。
ASE サークルは、ステアリングドットがターゲットに噛み合うために配置すべきゾーンと角度の限界を示します。 ターゲットまでの距離が減少したり、アスペクト角が大きくなると、ASE サークルは大きくなります。 これは、目標までの距離が減少すると、操舵誤差を大きくしてミサイルを発射できることを意味している。
テールラインから外れた角度はASEサークル上にあります。これは、平面図で航空機との関係でターゲットのアスペクト角を示しています。円の上部にある場合は、ターゲットが直接離れて移動していることを示しています。円の下の方にある場合は、ターゲットが直接あなたの方に向かって飛んでいることを示しています。
ターゲット指定子(TDボックス)は、自機に対する空間内のターゲットの位置を示しています。
目標範囲の目盛りは、HUDの右側の部分に沿って配置されています。 範囲の値はゼロから10海里までです。この固定スケールに沿って、スライドバーがターゲットの現在の射程距離を示しています。バーの隣にある数字は、ターゲットの閉鎖率を示します。また、AIM-9 発射のための Rmax と Rmin のバーもある。ターゲットまでの現在の射程距離が Rmax と Rmin の間にある場合、ターゲットは有効な発射ゾーンにある。
その他のデータは、HUDの右下のデータブロックにあります。 R “記号の後には、目標までの海里単位のデジタルレンジ値が表示されています。 射程距離データの下には、秒単位のインターセプトまでの時間(TTI)が表示されており、前にSが付いています。
AIM-9は全方位型のミサイルですが、ターゲットは後方の半球側から攻撃してください。 これはPKを増加させます。

AIM-7M Sparrow “Air-to-Air” Medium Range Missile (MRM) Mode
AIM-7M ミサイルは、F-15C に採用されている 2 種類の中距離空対空ミサイルの 1 つであり、セミアクティブレーダーホーミング(SARH)シーカーを搭載しています。AIM-7M では以下の HUD シンボロジーが使用されている。
Flood Mode
フラッドモードは、レーダーロックが不可能な場合の接近戦で最もよく使用されます。 洪水モードは[6]キーを押すことによってアクセスされ、HUD上の大きな、12度のレティキュールによって示される。 このモードでは、レーダーはFLOODレティキュール内に集束されたエネルギーの安定したビームを放出しています。
AIM-7Mを発射することで、ミサイルはレティキュール内のターゲットを迎撃しようとしますが、そのターゲットはミサイルのシーカーにエネルギーを反射しています。ターゲットはミサイル飛行中ずっとFLOODレティキュール内にいなければならない。このように、係合前にレーダーでターゲットをロックする必要はありません。 FLOOD」モードの表示は、HUDの右下のデータブロックに表示されます。 複数のターゲットがレティキュール内に入ってきた場合、ミサイルは最大のRCSまたは最も近い射程でターゲットを迎撃しようとします。
ターゲットが遠すぎたり、レティキュールの範囲から離れてしまった場合、ミサイルは追尾を失い、弾道に入ります。HUD の左下には、ミサイルの種類と残りの数が表示されます。AIM-7Mの場合は、ミサイルのタイプを “M”、バージョンを “M “と表示しています。例:AIM-7Mを4発装填した場合はM4Mと表示されます。

AIM-7M Target Tracking Radar Mode
AIM-7Mの基本的な長距離戦闘モードです。長距離索敵(LRS)取得モード[2]キーから目標をロックした後、ロック指定されている場合、レーダーは自動的にトラックファイルをSTTモードに転送します。追加情報はHUDに表示されます。

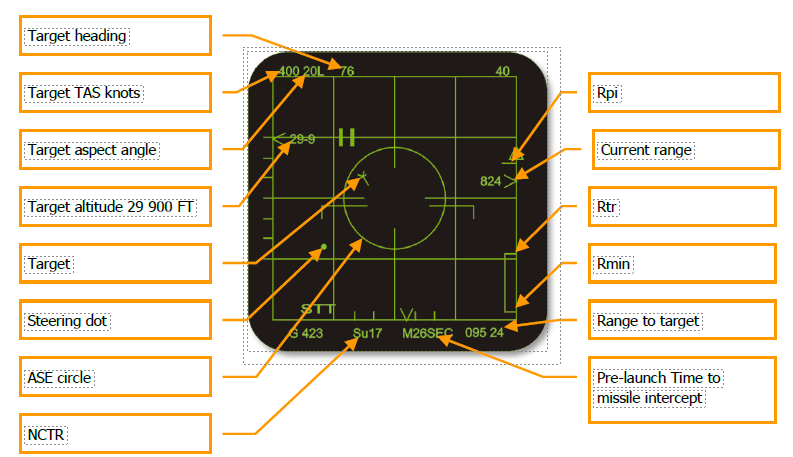
ターゲット指定(TD)ボックスは、航空機に対するターゲットの位置を示しています。
ASE 円は、最大の角度ステアリングエラー確率を示しています。ステアリングエラーの値は、ASEサークルの中心からのステアリングドットに比例します。ASE サークルは、与えられた確率で目標に命中させるために、発射前にステアリングドットを配置すべきゾーンを示しています。
円の大きさは、目標までの距離が減少すると大きくなり、これは、距離が減少するにつれて、より大きな操舵誤差でミサイルを発射することができることを意味する。自機を操縦することで、操舵ドットがASE円の中心にできるだけ近い位置にあることを確認する必要がある。
テールバーの角度オフは、ASEサークル上に位置しています。これは、平面図で自機に対するターゲットのアスペクト角を示しています。円の上部にある場合は、ターゲットが遠ざかっていることを示しています。バーが円の下部にある場合は、ターゲットがあなたの方に向かっていることを示しています。
HUD の右側には、ターゲットの射程距離の目盛りが表示されています。スケールの上限はレーダーの現在の範囲設定に対応しています。スケール上の3本の細長いバーは、ミサイルの最小射程距離(Rmin)、機動目標に対する最大射程距離(Rtr)、非機動目標に対する最大射程距離(Rpi)を表示します。スライドバーは、指定された目標までの現在の射程距離を表示します。射程バーの隣にある数字は、複合的な閉鎖速度を表示します。
HUD の右下部分では、データブロックが追加データを提供します。これには、ターゲットに対する現在のレンジのデジタル表示が含まれています。レンジ値は、R シンボルに続いて数字で表示されます
射程データの下には、最後に発射されたミサイルのインターセプトまでの時間(TTI)が表示されています
ターゲットアスペクト表示は、現在のレンジデジタルディスプレイの下にありますこれは、目標の縦軸と目標照準線の角度を表示します標的がテールオンの場合はT(Tail)マ ークが、ヘッドオンの場合はH(Head)マークが表示されます デジタル値の “R “と “L “の記号は、ターゲットの左右のアスペクトに対応しています.
ターゲットデジグネータボックスの下には、ターゲットがロックされ、有効なショットパラ メータの範囲内にある場合、点滅する三角形が表示されます 有効なショットは、選択されたウェポンの範囲内にターゲットがあり、ステアリング・ドットがASEサークル内にあることで判断できます.
HUDの左下には、ターゲットがロックされた時の3つのデータ項目が表示されている
RPI – 現在のステアリングでのインターセプトの最大射程距離確率等速で非操縦の目標を想定していますRTR – ターンアンドラン射程距離発射時に回避ターン&ランマニューバを実行している標的に対する最大射程距離を示し、現在のステアリングを使用して計算されるRmin – Rmin は、ミサイルのファジングとトラッキングを保証する最小射程距離です。
AIM-120AMRAAM “Air-to-Air” Medium Range Missile (MRM) Modes
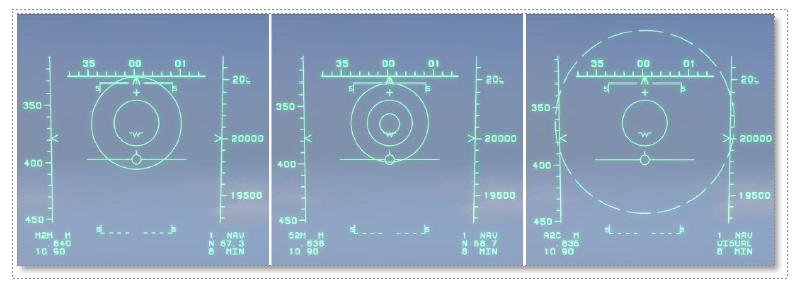
AIM-120AMRAAM “Air-to-Air” Medium Range Missile (MRM) Modes AIM-120B/C 空対空ミサイルは、F-15C の主要中距離兵器であるAIM-120 は AIM-7M とは異なり、アクティブ・レーダー・ホーミング(ARH)シーカーを搭載している長距離から発射された場合、初期には発射機から受信したデータリンク補正を用いて慣性誘導を行う終末期にはアクティブ・レーダー・シーカーが自動的にオンになり、自ら迎撃を完了させるビジュアルモードこのビジュアルエンゲージメントモードは、レーダーロックができない場合や素早い射撃が必要な場合に使用されますAIM-120をアクティブウェポンとして選択した状態で、[6]キーを押してビジュアルモードに入る ビジュアルモードでは、航空機のレーダーを使用せずにAIM-120(愛称スラマー)を発射することができますシーカーでターゲットをロックするためには、ターゲットが10海里以内にあり、HUDに表示されているミサイルシーカーの視野内にあることが必要であることに注意する必要があります
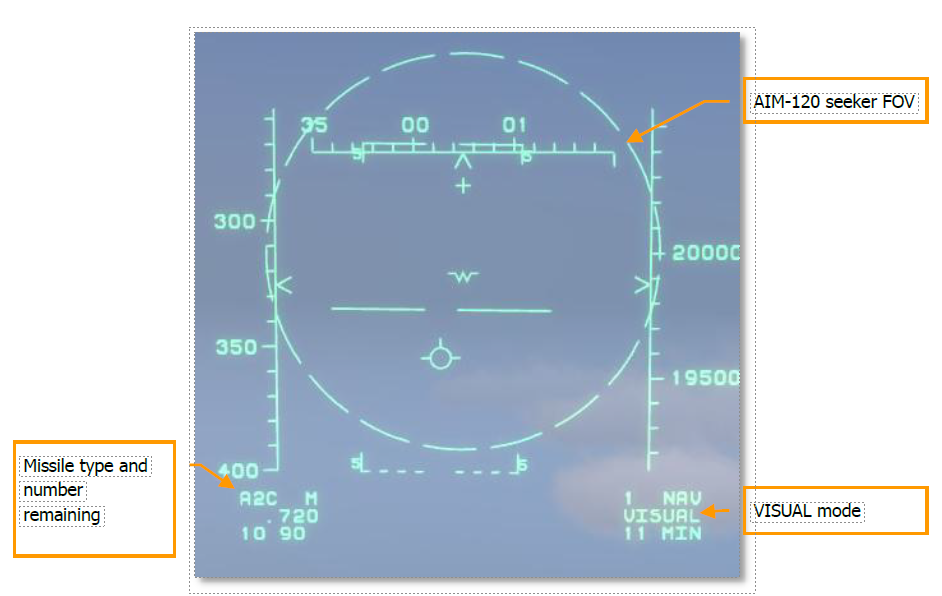
HUDの右下に「VISUAL」と表示されています HUDの左下には「AIM-120」が何機搭載されているかの表示があり、「AIM-120」は「A」と表示されていますミサイルタイプの表示の後の数字は、ミサイルタイプの残数を示しています最後の文字はミサイルのバージョン(BまたはC)を示しています例えば AIM-120C]を2発装填した場合は[A2C]と表示されますこのフィールドの下には、航空機のマッハとGロードが表示されますビジュアル」モードでAIM-120を発射する前に、ターゲットが破線レティキュールの内側に位置するように機体を操 作する必要がありますミサイルは発射準備完了の表示をしません発射から2秒後、ミサイルのアクティブレーダーホーミング(ARH)シーカーがオンになり、スラマーはそのシーカーの視野内のターゲットを探索します 複数のターゲットが検出された場合、ARHシーカーは最も近いターゲットを攻撃する 2つのターゲットがミサイルから同じ距離にある場合、より大きなレーダー断面積(RCS)のターゲットを攻撃します
Radar Target Tracking Mode, Pre-Launch
航空機のレーダーで1つ以上の目標を指定することが、遠距離での目標の主な交戦方法となりますLRS [2]モードから目標を指定したり、TWSから目標を2回指定したりすることができます RAlt-I]モードでは、レーダーに単一ターゲットトラック(STT)を開始するように命令します これにより、レーダーの注意をその1つのターゲットに集中させることができます このモードでは、上記のAIM-7Mモードと同様の動作をしますHUDに表示される追加情報には以下のものがあります
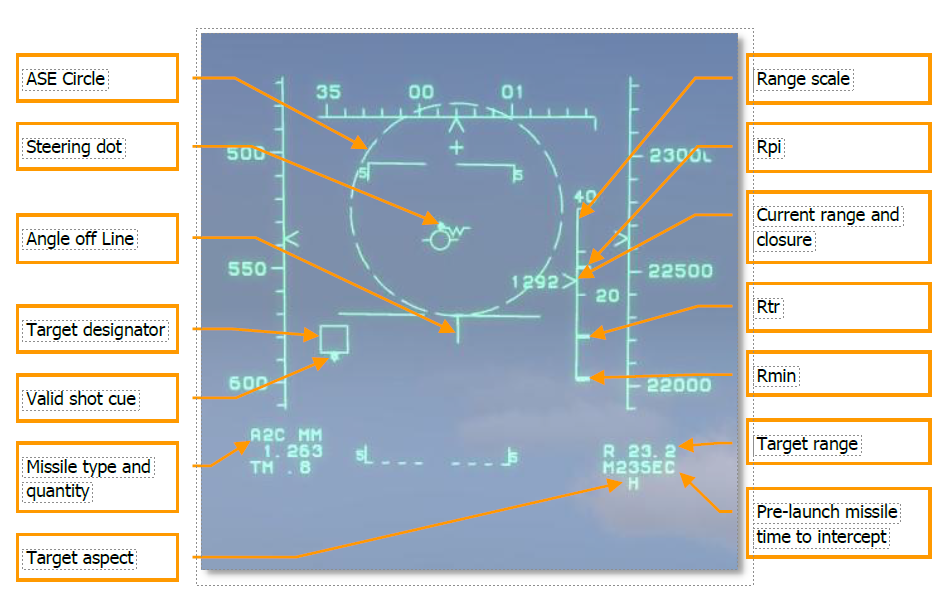
ターゲット指定(TD)ボックスは、自機に対するターゲットの位置を示しています。
ASE 破線の円は、最大角度の操舵誤差確率を示していますステアリング・エラーの値は、ASE 円の中心からのステアリング・ドットに比例しますASEの円は、与えられた確率で目標をキルするために、発射前にステアリングドットを配置すべきゾーンを示しています円の大きさは、目標までの距離が減少すると大きくなり、これは、距離が減少するにつれて、より大きな操舵誤差でミサイルを発射することができることを意味する自機を操縦する際には、操舵ドットをできるだけ ASE 中心に近づけるようにする必要があります。
テールバーの角度オフは、ASE 円上に位置していますこれは、平面図での自機に対するタ ーゲットのアスペクト角を示しています円の上部にある場合は、ターゲットが遠ざかっていることを示しています円の下の方にバーがある場合は、ターゲットが自分の方に向かっていることを示しています。
HUDの右側には、目標範囲の目盛りが表示されています 目盛りの上限は、現在のレーダーの設定範囲に対応しています 目盛り上の3本の細長いバーは、ミサイルの最小射程距離(Rmin)、操縦目標までの最大射程距離(Rtr)、非操縦目標までの最大射程距離(Rpi)を表示していますスライドバーは、指定された目標までの現在の射程距離を表示しますレン ジバーの隣にある数字は、複合的な閉鎖速度を表示します
HUD の右下部分には、データブロックがあり、追加データを提供します これには、タ ーゲットとなるデジタル表示までの現在のレンジが含まれていますレンジ値は、R 記号の後に数字で表示されます
現在のレンジのデジタル表示の下には、ターゲットのアスペクト表示がありますこれは、ターゲットの縦軸と照準線の角度を表示しますターゲットがテールオンの場合はT(Tail)シンボル、ヘッドオンの場合はH(Head)シンボルが表示されます デジタル値のRとLの記号は、ターゲットの左右のアスペクトに対応しています。
ターゲット指定ボックスの下には、ターゲットがロックされていて、有効なショットパラメ ータの範囲内であれば、点滅する 5 点星が表示されます ターゲットが選択したウェポンの射程内にあり、ステアリング・ドットがASEサークル内にあることで有効ショットと判断できます
目標がロックされている場合、HUD左下には、選択された武器と残弾数、自艦マッハ、目標マッハの3つのデータ項目が表示される。
ミサイル迎撃までの時間は、左にMと、その時点で発射した場合に目標に到達するまでの推定秒数が表示されている。
秒単位の時間は、その瞬間に発射された場合、ミサイルがシーカーを起動して迎撃を継続するまでの時間を示しています
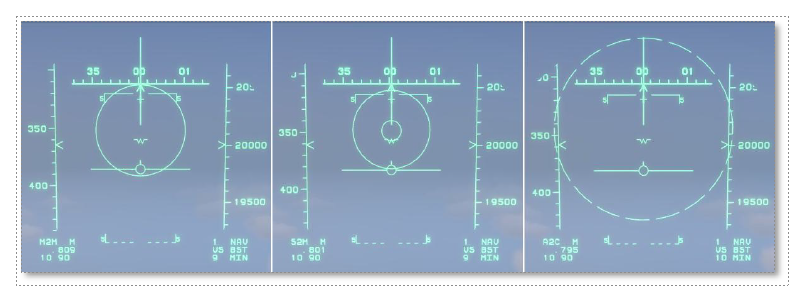
レーダー目標追跡モード、打ち上げ後AIM-20B/Cを起動した後、インターセプト情報の追加時間がHUDに表示されます。61p
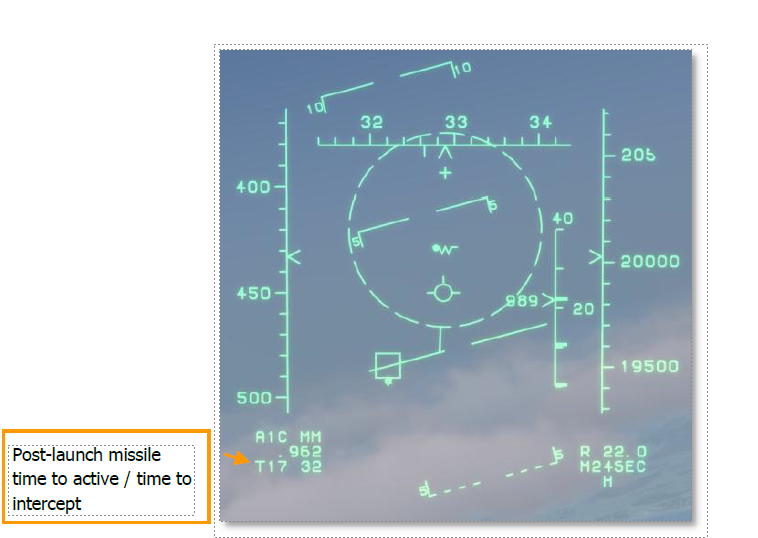
AIM-120 が発射されると、HUD の左下に発射後のタイム・トゥ・アクティブ(T)/タイム・トゥ・インターセプト(M)データが点滅表示されます。
Tが表示されている場合、右の数字は、ミサイルの搭載シーカーが引き継ぐまでの残り秒数を示しています。その右の数字は、ミサイルの迎撃までの推定時間を示しています。
ミサイルがそのシーカーの活動距離に達すると、TはMに変わり、迎撃までの時間だけが残ります。
Auto ACQuisition (AACQ) Radar Modes
F-15Cは3つの近距離レーダー自動捕捉モードを採用しています。 これらのモードは、ACM交戦中に敵機を自動的にレーダーロックするために使用されます。 これらのモードの最大ロック範囲は10海里です
Boresight AACQ Mode BORESIGHT [4]キーモードでは、前方の狭いコーン内のターゲットを自動的にロックすることができます。このモードでは、レーダー視野(FOV)は航空機の真正面にあり、外側のレチクルにはこのスキャンエリアが表示されます。レーダーはFOVに入ってきた最初のターゲットをロックします。
I自動ロックオンモードでは、最初に検出されたターゲットをレーダーが追跡します
Boresight AACQ Mode
BORESIGHT [4]キーモードでは、前方の狭いコーン内のターゲットを自動的にロックすることができます。このモードでは、レーダー視野(FOV)は航空機の真正面にあり、外側のレチクルにはこのスキャンエリアが表示されます。レーダーはFOVに入ってきた最初のターゲットをロックします。
ターゲットにロックオンした後、レーダーはSTTモードに切り替わります。
Vertical Scan AACQ Mode
VERTICAL SCAN [3]キーモードは、自機と同じ垂直面内にあるターゲットをロックアップすることができます。これにより、ACM(Air combat maneuvering)中に自動的に高Gで目標をロックオンすることができます。このモードでは、レーダーは幅7.5度、垂直方向に-2~50度の空域をスキャンします。HUDには2本の垂直線が表示されます。ターゲットをロックアップするには、この2本のラインの間にターゲットを配置するか、揚力ベクトルに沿ってターゲットを配置する必要があります。最大の垂直スキャン範囲は、あなたの上部HUDフレームの上の約2つのHUDの高さです。
ターゲットにロックオンした後、レーダーは自動的にSTTモードに切り替わります。
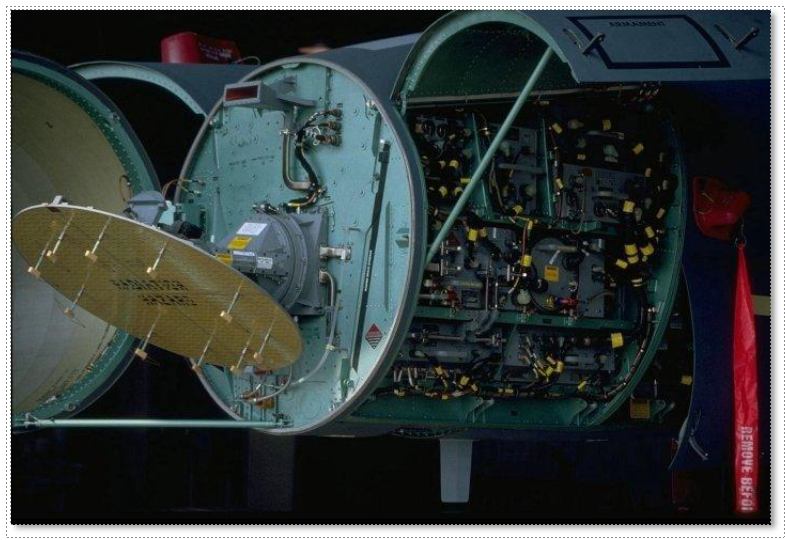
N/APG-63(V)1 Radar
第二次世界大戦以来、”全天候型戦闘機 “の定義機能は、そのオンボード航空迎撃レーダーセットであった。雲を突き通す電波の能力の徳によって、この強力なセンサーは日夜、視覚か赤外線検出を低下させることができる天候の条件から独立した空気のターゲットに対して武器を検出し、指示する機能を戦闘機に提供します。また、レーダーは非常に長い探知範囲を提供することができ、現代のBVR(Beyond Visual Range)空戦に適したセンサーとなっています。
F-15C戦闘機にはAPG-63レーダーが搭載されている。これらのレーダーの大部分は、機械的にスキャンされた平板状のスロットドアレイアンテナを備えた「Xバンド」(10GHz)レーダーである。MiG-29とSu-27にはそれぞれN019とN001が搭載されており、これらのレーダーは同じ周波数帯で運用されているが、初期のソビエト戦闘機と同様にツインリフレクター式の「ツイストカセグレン」アンテナを採用している。
これらの航空迎撃レーダーの特徴と限界は、空中決闘の BVR 段階で採用される戦術を大きく左右する。多くの詳細は秘密のままであるが、十分な情報は、各敵対者が他のハードウェアの限界を利用して優位性を得るように努めるBVR戦闘のダイナミクスの興味深い肖像画を作成するために利用可能になった。
レーダーは、電波を狭いビームに集束して宇宙空間に送信し、ターゲットから反射された信号を受信することによって動作します。この集束はレーダーアンテナによって達成され、ビームの狭さはレーダーの最大検出範囲と目標の解像度に影響を与えます。スペースを節約し、戦闘機に最適な集束力を持つ可能な限り大きなアンテナを搭載するために、1台のアンテナをパルスモードで使用し、1秒間に数千回の時間共有送受信機能を高速で切り替えています。この変調パルス繰り返し周波数(PRF)は、電波自体のはるかに高い動作周波数(例えばXバンド)から区別されています。ベトナム戦争の間に、北ベトナムの戦闘機は、パルスレーダー装備のアメリカの戦闘機から隠されたままにするために低高度を採用することを学んだ。相手より低い高度で飛ぶことによって、それらは敵のレーダーアンテナが地球の方に、下向きの角度に直面するように操縦されなければならないことを保障した。この「ルックダウン」幾何学では、目標から反射されたレーダー信号は、周囲の地球の背景からの反射によってかき消され、レーダーが目標を検出したり、追跡したりすることは実質的に不可能であった。このようなルックダウン方式による防御上の優位性から、F-111やトネードをはじめとする、超低空でも迎撃を受けずに安全に防空を突破できるように設計されたNATOの攻撃機の全世代が生まれた。APG-63(V)1、N019、N001のような最新のパルスドップラーレーダーは、安定したコヒーレント振器を採用しており、複数の反射信号を統合して周波数の小さな変化を検出することができます。ドップラー効果により、航空目標に接近したり後退したりした反射信号は、地球上で跳ね返った反射信号とは異なる周波数シフトを示します。パルスドップラーレーダーは、このように、相対高度に関係なく、ほとんどの航空目標を探知し、追跡し、交戦させることができる「ルックダウン/シュートダウン」機能を備えています。ソ連軍にMiG-29が登場したことで、NATOのドクトリンは低空からステルスやマルチロール戦闘機へと変化しました。
パルスドップラーレーダーはこのように、地球を背景にして低高度の目標を識別するために「閉鎖」(すなわち目標接近速度)に依存しています。防御側の航空機は、しばしば “ビーミング “または “フライング・ザ・ノッチ “と呼ばれる戦術によってパルス・ドップラー・レーダー・ロックを破ることができ、これは敵のレーダー・ビームに垂直な軌道上を飛行することで構成されています。防御パイロットは、航空機のレーダー警告受信機(RWR)ディスプレイで脅威のレーダーを観測し、その脅威を “3 “または “3 “の位置に配置するために飛行する。
“9時の位置。防御戦闘機は脅威に向かっても遠ざかっても飛ばず、その閉鎖は、ルックダウンジオメトリでは周囲の地形、ルックアップジオメトリでは展開されたチャフ対策と同じである。
周囲の地形の閉鎖率は、主レーダービームの軸に沿って受信された地上反射信号(「クラッ
ター」)に起因して、レーダーの感度に一次的な「ノッチ」を効果的に発生させる。この「下を向いたクラッターノッチ」内のターゲット信号は、あたかも地上のクラッターであるかのようにフィルタリングによって拒絶され、ビーミングターゲットがレーダーロックを解除することを可能にします。しかし、アンテナの集束は決して完璧ではなく、一部の送信エネルギーはまた、サイドローブと呼ばれる意図しない方向に流出する。また、このエネルギーは地上から反射し、サイドローブ方向からアンテナに再入射することもある。戦闘機が低空飛行中の場合、地上から反射された信号はレーダーに入り、戦闘機の上昇・下降速度と同じ閉鎖度、戦闘機の高度と同じ範囲で、追加のクラッターとしてスコープ上に表示されることがあります。戦闘機が同じ速度と射程距離で移動中の標的を追跡している場合、標的の信号がサイドローブのクラッタで失われ、ロックが解除されることがあります。これは、戦闘機のレーダー感度に二次的な「ノッチ」を作ることができます。サイドローブのクラッターは通常小さい「監視」ホーンのアンテナの助けを借りてろ過される(「補償される」)。ガードアンテナはサイドローブの方向のメインアンテナより敏感であるように設計されているが、メインビームの軸線に沿ってより少なく敏感である。メインチャンネルとガードチャンネルで受信された信号は、その後、比較され、それらがガードチャンネル上で強い場合は、サイドローブクラッターとして拒否されます。
PG-63のような平板レーダーアンテナでは、ガードホーンはスロットアレイに取り付けられており、それと一緒にスキャンすることで全スキャン方向で良好な補正を行っている。しかし、N019やN001のようなロシアのカセグレンレーダーでは、ガードホーンはスキャンリフレクターに取り付けられていないが、むしろ固定されており、下向きの方向に向けられている。レーダーロック中に低空で戦闘機をバンキングさせると、補償ホーンが地面から離れて回転し、サイドローブ補償が低下し、地面のクラッタのためにロックが解除されます。捜索モードでの通常の走査動作中は、レーダーカセグレンアンテナハウジング全体が回転ジンバル上でロールスタビライジングされ、地平線との方向性を保つ。このモードでは、戦闘機のロールが回転ジンバルの限界(バンク角110~120度)を超えると、スコープから捜索目標が失われる可能性があります。MiG-29やSu-27のパイロットは、このように、交戦中の運用高度について慎重な判断を下す必要があります。F-15Cのパイロットはレーダー性能の制約が少なく、高度がミサイル性能に与える影響に基づいてそのような決定を行うかもしれません。
現代の戦闘機はすべてレーダー警告システム(RWS)を装備している。RWSは、放射しているレーダーシステムの方位と種類を識別する。レーダーシステムのタイプを識別した上で、レーダーを搭載している兵器システムのタイプ(またはクラス)を推測することは一般的に安全である。
現代のレーダーは、異なるパルス繰り返し周波数を持つ、非常に多様なモードで動作することができます。
(PRF)と異なるスキャンゾーンがあります。PRFは、1秒あたりのレーダーパルス数です。PRFを変更すると、異なるアスペクト角で飛行するターゲットを検出する際に、レーダーの感度を上げるために使用されます。PRFを高くすると、自機に向かって飛んでいるターゲット(高アスペクト)を検出しやすくなり、PRFを中程度にすると、閉塞率が低いターゲットや自分が後ろにいるターゲットを検出しやすくなります。 デフォルトの動作モードでは、レーダーは高PRFと中PRFの間でサイクルし、すべてのターゲットのアスペクトを検出します。これはインターリーブモードと呼ばれています。捜索モードでは、レーダーは広いスキャンゾーンで動作します。ターゲットトラックモードでは、レーダーは狭い方位角帯で動作する。レーダーはターゲットロックオンの後でトラックモードに変わる。
多くの現代レーダーにはスキャン(TWS)モードの間にトラックの形態がある。それは複数のターゲットの同時追跡を提供する。このモードの主な利点は、空域の広いゾーンの詳細な情報を提供することである。しかし、スキャンゾーン外の目標についての情報は提供されない。 このモードでの目標の動きは、予測によって追跡されることが多い。走査期間は比較的短いが、高速で機動的な目標は素早いマニューバを行い、スキャンゾーンを離れることができる。レーダーディスプレイには、ターゲットの予測された軌跡が表示されます。位置の次の更新は、定義された時間が経過し、トラックファイルが作成された後にのみ行われます。
スキャンモードのトラックでは、多数のターゲットの詳細な情報があります。しかし、このモードでは、スキャン期間中の時間内のターゲットの位置予測が使用されます。目標は予期せぬ行動をすることで調査区域を離れることがあります。
本シミュレーションでは、F-15C のレーダーは AN/APG-63(V)1 パルスドップラーレーダーを使用しています。レーダーをオンにして、[I]を押します。すると、レーダー情報がフロントダッシュ左上部分のVSD(Vertical Situation Indicator)に表示されます。レーダーには、以下のようないくつかのモードがあります。
Long Range Search (LRS) Mode
LRS [2]キーモードは、長距離の捕捉と交戦を目的としたF-15Cのプライマリーレーダーモードです。パイロットは捕捉範囲(10、20、40、80、160海里)を設定し、方位幅と高度を変更することができる。レーダーの接触位置に関する情報は垂直状況表示(VSD)に表示されますが、接触速度、高度、方位に関する情報は提供されません。
VSDは、航空機の上からの平面図としてレーダー画像を表示し、選択された距離スケールに合わせて表示します。ターゲットコンタクト(ヒットとも呼ばれる)は、自機からの距離に応じてVSD上に配置されています。 最も近いヒットはVSDの下の端にあり、より遠いものは上にある。レーダーは16までのターゲットを同時に追跡することができます。レーダーはまた、すべてのターゲットを自動的に味方か敵か(IFF)を照会します。 友好的なヒットは円として、敵対的なヒットは長方形として表示されます。
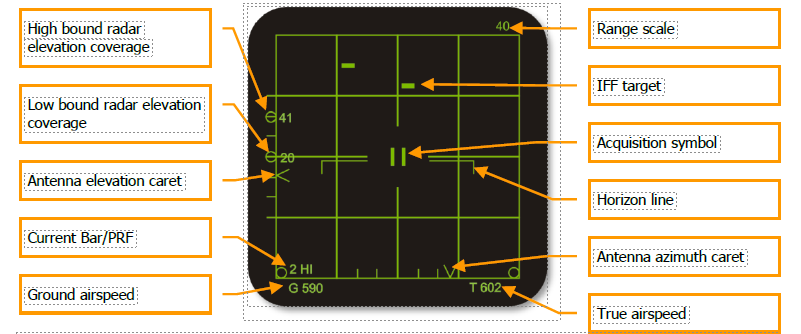
VSDの右上には、現在のレーダーの範囲設定が表示されます(10、20、40、80、160海里)。 VSDの左側には、レーダーの標高スキャンエリアが表示されます。 小さな円に近い数字は、VSD上の現在の範囲でのターゲット指定カーソル(TDC)の高度と低高度のカバー範囲の限界を示しています。 レーダービームはアンテナから離れれば離れるほど大きくなる円錐形であるため、TDCの範囲が広くなるにつれて高度カバー範囲は広がります。
RShift+;]キーと[RShift+.キーでレーダーの高度範囲を上下に60度傾けることができます。 それに応じて高度範囲の円が上下に移動します。各バースキャンの角度カバレッジは2.TDCをVSDの上限と下限に移動させることで、自動的にレンジを上下に「バンプ」させることができます。
対地速度 “G “と真の速度 “T “の値はVSDの下端に表示されます。常に変化する昇降バーとパルス繰り返し周波数(PRF)の値が左下に表示されます。
常にHI – MED PRFが交互に表示されているため、異なる角度から飛んでくるターゲットを検出することができます。 HI “高PRF周波数モードでは、遠くから真正面からのターゲットを検出することができます。”MED “中PRFは、飛距離は少ないですが、目標の検出に優れています。 これはインターリーブモードと呼ばれるもので、ゲーム中のF-15Cでは標準的なLRSモードとなっています。RShift + I]でHI、MED、インターリーブドを切り替えることができます。
VSDの下部には、選択された方位角走査ゾーンの幅を反映する水平スケールが表示されます。デフォルトの幅は-±600ですが、[RCtrl+-]キーを押すことで-±300を選択することができます。 目盛りに沿った2つの円はアンテナのアジマス走査限界を表し、このゾーンの内側にはアンテナの現在のアジマス位置を表示する移動するキャレットがあります。 600 設定ではスキャンエリアが広くなりますが、±300 設定ではターゲットの更新が速くなります。
レーダーを接点にロックオンさせるには、[;], [,], [.], [/]キーを使って接点の上にTDCを移動させ、[Enter]キーを押します。 すべてのロック条件が満たされると、レーダーは自動的にシングルターゲットトラック(STT)モードに移行します。
Single Target Track (STT) Mode
LRSモードからターゲットをロックすると、レーダーはSTTモードに切り替わります。これでレーダーは単一のターゲットに全エネルギーを集中させ、一定のアップデートを提供するようになります。 しかし、レーダーは他の接触を検出しなくなり、敵はこのレーダーロックによって警告を受ける可能性があります。 STTモードのVSD表示は、LRSモードとほとんど変わりません。VSD の左下隅に STT インジケータが表示されます。ロックされたレーダーターゲットは、飛行ベクトル線が来る星として表示され、それがプライマリ指定ターゲット(PDT)であることを示しています。
AIM-7を起動するには、STTモードに入るか、近距離でフラッドモードに切り替える必要があります。
非協力的目標認識(NCTR)システムは、ロックされた目標を自動的に識別(印刷)しようとします。システムは、異なる航空機のレーダー署名サンプルのライブラリをメモリに保存し、ロックされたターゲットと比較しようとします。
署名の識別方法は、ターゲットの第1段コンプレッサブレードによって部分的に決定されるレーダーリターンに基づいています。シグネチャがライブラリエントリと一致した場合、VSDの下部中央付近にターゲットの名前が表示される。このような方法は、ターゲットの識別が成功することを100%保証するものではない。 ターゲットの範囲、標高差、およびターゲットのアスペクトはすべてNCTRプリントに影響を与える可能性があります。68p
F-15C HUD Operating Modes F-15C Operating Modes(3)