Group Route Planning
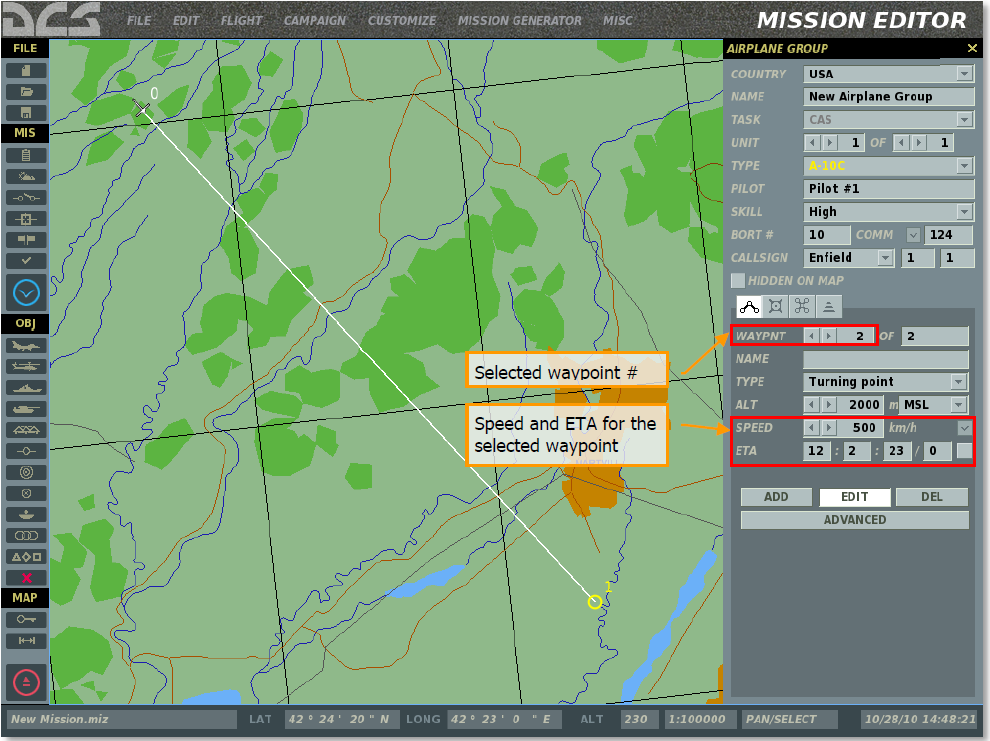
グループルートを配置する際には、各ウェイポイントの希望速度(”SPEED”)と到着予定時刻(”ETA”)を設定することが基本機能の一つとなります。
ミッション設計者の計画に応じて、パネルフラグを使って各ウェイポイントでどちらか一方、両方、またはどちらでもない値を “ロック “することができます。どちらかの値がユーザーによってロックされると、ミッションエディタは自動的に連続したウェイポイント間の既知の範囲に基づいてもう一方の値を計算します。

速度と ETA の値をロックするには、速度と ETA のロックのすべての組み合わせが常に可能とは限らないため、 ウェイポイントロックの設定間で論理的な一貫性が必要です。ルートのウェイポイントロックは、AIが常にルートに沿ってどこかに基準となる時間値を保持するように配置する必要があります。4 つのウェイポイントで構成される比較的単純なルートの例を使用すると、以下の 6 つのロック設定の組み合わせが有効です。
Example 1
DCS USER MANUAL
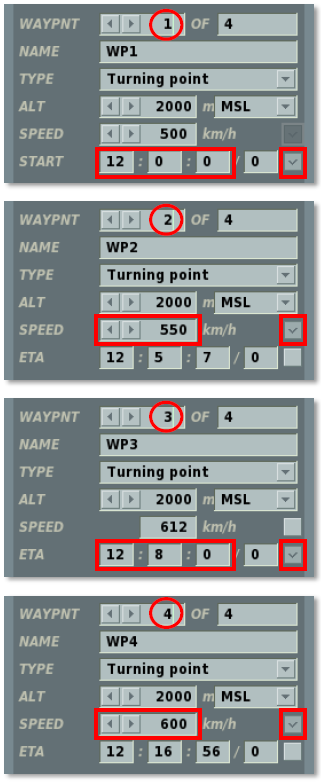
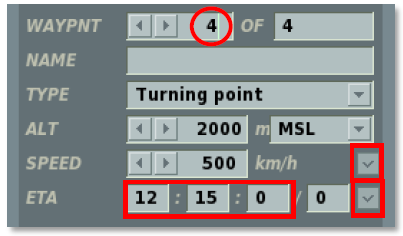
User locks:
Group start time (Т1), i.e. ETA for WP1;
ETA for the final waypoint (Т4);
この場合、ユーザーはウェイポイント2と3の速度とETA、WP4の速度を制御しません。これらの値は、ミッションエディタによって自動的に計算されます。ミッションエディタは、指定されたETAでWP4に到達するためのルートの平均速度を計算します。希望の速度はウェイポイントまでの速度、つまりAIグループが前のウェイポイントを通過したら想定する速度であることに注意してください。AI グループは、WP4 にロックされた ETA で WP4 に到着するために、必要に応じて WP2、WP3 および WP4 のための速度を調整することを試みる。

ユーザーがWP1またはWP4のETAのロックを解除すると、ミッションエディタにWP2とWP3の希望する速度を計算するための時間基準がないため、ルートは無効になります。ルートが無効になると、速度とETAのチェックボックスが赤く枠で囲まれてエラーを示し、ユーザーがグループプロパティメニューを閉じたり、ミッションを保存しようとすると、対応するメッセージが表示されます。ウェイポイントの速度とETAの両方をロック解除するためには、少なくとも1つの先行するウェイポイントと後続するウェイポイントのETAがロックされていなければなりません。
Example 2
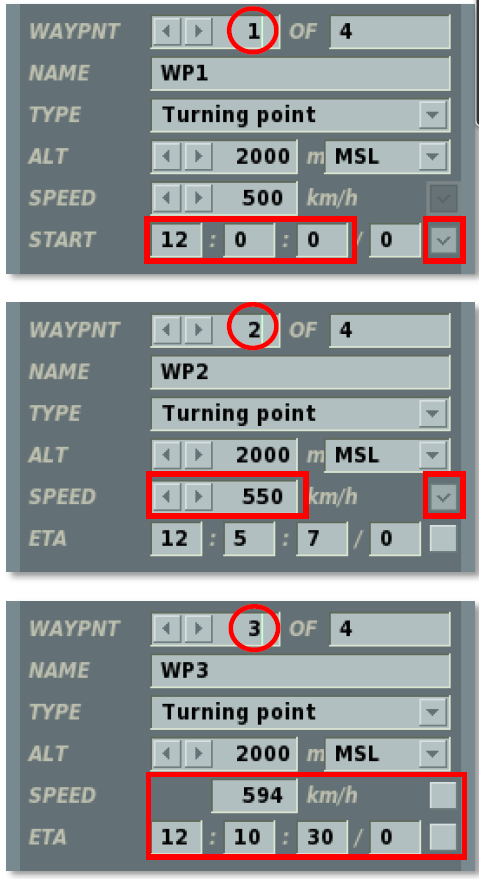
User locks:
Group start time (Т1), i.e. ETA for WP1;
Speed (V1 – V4) for each waypoint;
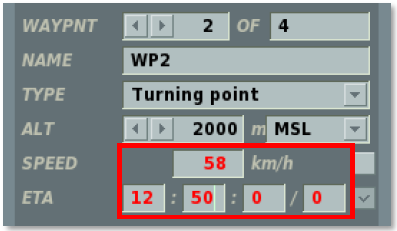
この場合、ユーザは、最初のウェイポイントの後に任意のウェイポイントのETAを制御するのではなく、グループがルートに沿って所望の速度を維持することを保証したいと考えている。ミッションエディタは、ウェイポイントの既知の範囲とロックされた希望速度に基づいて、WP2, WP3, WP4のETAを自動的に計算します。
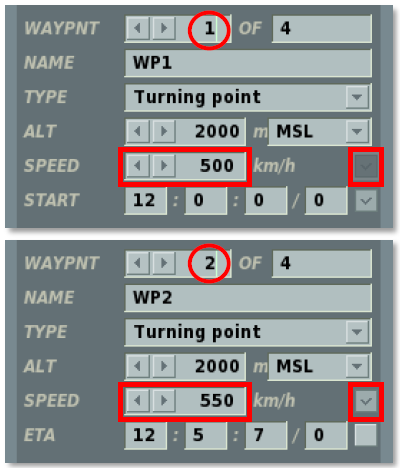
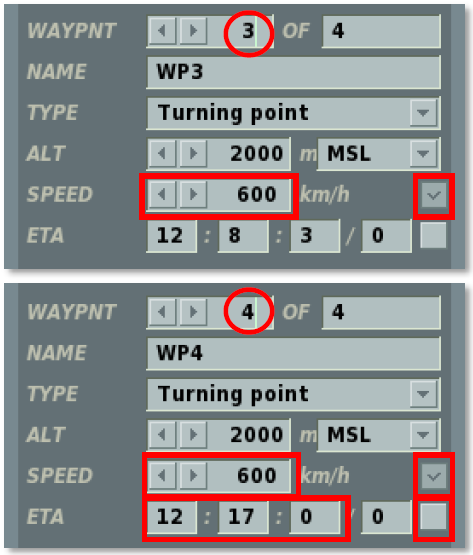
Example 3
User locks:
Group start time (Т1), i.e. ETA for WP1;
ETA for all other waypoints (Т2, Т3, Т4);
この場合、ユーザは、ウェイポイントが指定されたETAに確実に到達するようにしたい。AIグループは、指定されたETAで各ウェイポイントに到着するように各ウェイポイントの速度を維持しようとする。ミッションエディタは、既知の範囲と連続するウェイポイント間のETAに基づいて、各ウェイポイントの所望の速度を計算する。

Example 4
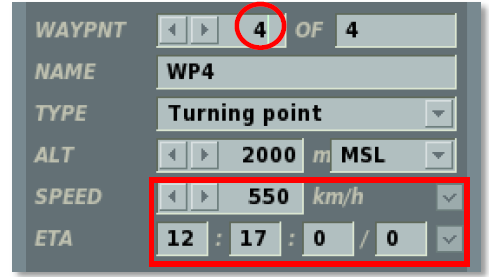
User locks:
Group Start time (Т1), i.e. ETA for WP1;
Desired speed for WP2 and WP4 (V2, V4);
ETA for WP3 (Т3);
この場合、ユーザーはWP3のETAとWP2とWP4の移動速度をコントロールします。ミッションエディタはWP2とWP4のETAとWP3の速度を自動的に計算します。
Example 5
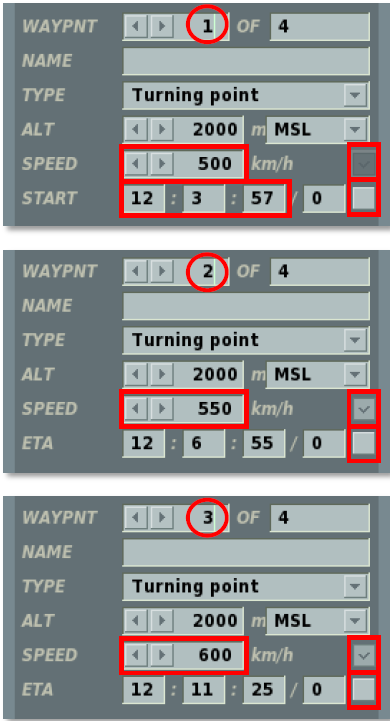
- User locks:
- Group start time (Т1), i.e. ETA for WP1;
- ETA for the final waypoint (Т4);
- Desired speed for WP2 and WP4 (V2, V4);
この場合、ユーザーはWP4のETAと、WP2とWP4の移動速度をコントロールします。このようなルートが有効なのは、始点と終点の間に、速度とETAの両方がアンロックされているウェイポイント(この場合はWP3)が少なくとも1つ存在するためで、ミッションエディターは、WP1、WP2、WP4の設定に合わせて、必要に応じて両方の値を自動的に計算することができます。
AIグループは、WP3の速度を調整して、WP4に指定されたETAと希望の速度で到着するようにします。ミッションエディターでは、WP2とWP3のETAとWP3の希望速度が自動的に計算されます。
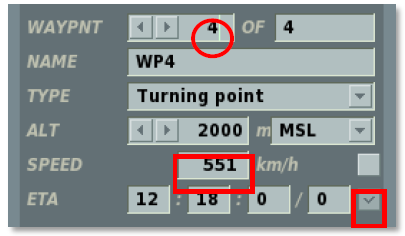
Example 6
User locks:
- 最終ウェイポイントまでの距離(Т4);
- WP2~WP4の希望速度 (V2 – V4);
この場合、ミッションエディターは自動的に開始時間(WP1のETA)を計算します。
SPEEDやETAの値が特定のユニットの有効範囲外の場合(希望速度が最低飛行速度以下の場合など)、SPEEDやETAのフィールドが赤色のフォントに変わり、無効な値の警告が表示され、ユーザーがGroup Properties Menuを閉じたり、ミッションを保存しようとすると、対応するメッセージが表示されます。このようなエラーを修正するには、ロックされたフィールドに有効な値を入力してください。
例えば、すべてのウェイポイントのスピードを固定し、同時にスタート地点と最終地点のETAを固定するなど、無効なルートを設定しようとすると、SPEEDとETAのチェックボックスが赤枠で表示され、フラグエラーの警告が表示され、グループのプロパティパネルを閉じたり、ミッションを保存しようとすると、対応するメッセージが表示されます。
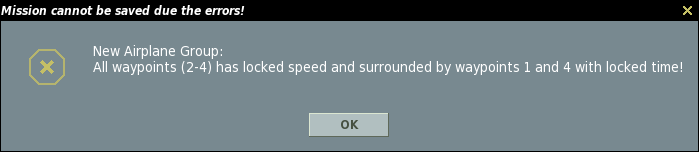
このようなエラーを修正するには、ウェイポイントロックを有効なルートの組み合わせに設定します。
HINT:
- グループのプロパティパネルを閉じるときにエラーメッセージが繰り返し表示されるのを避けるために、地図上のウェイポイントを選択するのではなく、ウェイポイント編集パネルを使ってウェイポイントを循環させてください。

- 無効なSPEEDやETAの値の警告(赤いフォント)を修正するには、有効な値を入力してください。
- 無効なフラグ警告(赤いチェックボックス)を修正するには、SPEEDとETAのロックを有効なルートの組み合わせに設定してください。
- すべてのルートには、ロックされたETAを持つウェイポイントが少なくとも1つなければなりません。これは、グループのスタート時間を設定するための最初のウェイポイントであっても、それ以降のウェイポイントであってもかまいません。
- ミッションエディターでは、スピードロックとETAロックの組み合わせの設定を妨げることはありませんが、無効な組み合わせが設定された場合には、無効な値の警告または無効なフラグの警告が表示されます。グループのプロパティやミッションを保存しようとすると、無効なルートが存在する場合には、警告ウィンドウがポップアップします。
Place Airplane and Helicopter Group

オブジェクト(OBJ)ツールバーの上部には、「Place Airplane」と「Place Helicopter」というボタンがあります。これらのボタンを使って、航空機グループをミッションに配置し、そのルートや行動を設定します。航空機グループを配置する際に注意しなければならないのは、グループは1〜4のユニット(航空機)で構成されているということです。固定翼と回転翼(ヘリコプター)の配置機能は非常に似ているので、合同で説明します。
航空機グループのプロパティメニューには、以下のような多くの機能があります。上から下に向かって説明していきます。

COUNTRY 国」のドロップダウンリストには、「CREATE NEW MISSION」ボタンでミッションを最初に作成したときに、RED側またはBLUE側に割り当てられていたすべての国が表示されます。選択した国によって、使用可能な航空機のタイプが異なります。
NAME Name欄には、航空機グループのユニークな名前を入力できます。入力しない場合は、デフォルトの名前が生成されます。作成した名前は、Group Dead条件などの一部のトリガーを割り当てる際に使用されます。複数のグループに同じ名前を付けないように注意してください。
TASK.グループのタスクを選択するためのドロップダウンメニューです。この設定は、ミッションの期間中、グループに有効です。なお、グループタスクはAdvanced Actions Panelで利用可能なアクションや自動生成されるアクションのフィルターとして機能し、デフォルトで利用可能なペイロードも設定されます。
- NOTHING このミッション・タスクは、ルートに沿った非戦闘飛行を想定している。このような航空機は、敵軍に対するいかなる積極的な行動にも参加せず、ただルートに沿って飛行する。敵の攻撃の脅威にさらされた場合、航空機はそれを回避しようとする。
- AFAC。Airborne Forward Air Controller(AFAC)のミッションタスクでは、割り当てられた航空機にスモークロケットや照明フレアでターゲットをマークするよう設定する。夜間のミッションでは、CAS(Close Air Support)ミッションを行っているプレイヤーをサポートするために航空機を割り当てるのに便利なタスクです。
- ANTI-SHIP STRIKE。対艦ミサイルを使用して、敵の海洋船舶を攻撃するミッション・タスク。
- AWACS。(Airborne Warning and Control System)の略。AWACSは、計画された直線または円形のルートを、ループ状のウェイポイントを使って飛行し、敵機を発見すると、味方の航空機やSAMサイト、船舶に警告を与える航空機です。一部のSAMシステムは、自軍の捕捉レーダーシステムが破壊されても、AWACSから直接ターゲットデータを受け取ることができる。なお、AWACSの探知は、射程距離、目標高度の低さ、地形によるマスキングなどによって制限されることがあります。
- CAP(Combat Air Patrol)。CAPの任務は、決められたルートの周りにループ状のウェイポイントを使用して、大きなレーストラックパターンを飛行することです。敵機の侵入から地域を守るために、定義されたルートの周りにループ状のウェイポイントを使って大きなレーストラックパターンを飛行することを意味します。このタイプの任務では、敵の地上目標を発見して破壊したり、計画されたルートから大きく外れて航空機を迎撃したりすることはありません。高高度のCAPは、低レベルのインターディクションのための生活を自機にとって容易にすることを意識してください。高/低CAPのサンドイッチの組み合わせは、最もバランスのとれた配備です。パトロール中の重要な要素は、CAPの距離と時間を制限する燃料の負荷です。ミッションデザイナーがアドバンスドアクションパネルで手動で無効にしない限り、すべてのAI航空機は、燃料が帰還に必要な保証された最低量になると、すぐにパトロールを中止し、直線ルートで基地に帰還します(ビンゴ燃料状態)。
- CAS(Close Air Support)。CASは、戦場で敵の地上目標を積極的に探し出し、砲撃を受けている味方の地上ユニットを支援するためにそれらを破壊する。この任務は、専用の攻撃機やヘリコプターに最も適している。
- ESCORT。この任務は戦闘機や攻撃ヘリに割り当てられ、味方の航空機(輸送機、爆撃機、攻撃機)を護衛し、敵の航空機や防空システムの攻撃からルート上の航空機を防御する。その際、護衛艦は、敵に脅威を与えない場合やコースラインから大きく外れている場合には、敵との戦いに参加してはならない。
- FIGHTER SWEEP. 戦闘機掃射の任務は、敵の空域に侵入して敵の戦闘機やその他の種類の航空機を攻撃する戦闘任務である。戦闘機掃射の主な目的は、制空権を獲得し、味方の航空機が滞りなく空域を利用できるようにすることである。戦闘機掃討作戦に参加する航空機は、飛行場からかなり離れた場所で長時間のドッグファイトに参加することになるため、燃料搭載量が重要な要素となる。
- GROUND ATTACK(地上攻撃)。この任務は、様々な空対地兵器を使って敵の地上目標を攻撃するために使用される。このタイプのミッションでは通常、500〜20000ポンドの無誘導爆弾と無誘導ロケットが使用される。高度なタスクオプションで特に設定されていない限り、AIは通常、無誘導ロケット弾や大砲などの短距離兵器よりも、誘導空対地ミサイルなどの長距離兵器の使用を優先する。
- インターセプト。これは防衛的な任務であり、航空機は敵機の接近を積極的に探索したり、地上や空中のレーダーから標的データを受信したりしなければならない。このタイプの戦闘タスクは、大規模な防衛や積極的なパトロールのために用意されており、小さなエリアやローカルな施設を守るときには使用してはならないものである。敵を追いかけている間に、迎撃機は計画されたルートから大きく逸脱してしまい、防衛すべきエリアが無防備になってしまうことがあります。
- pinpoiont strike. ピンポイント・ストライクの任務では、精密誘導兵器を用いて地表の目標を探知し、攻撃する。偵察。偵察タスクのウェイポイントの真上を飛行し、情報収集に努める。
- REFUELING(REFUELING)。この任務は空中給油機に割り当てられている。この任務を与えられた航空機は、飛行中に喉が渇いた同盟国の航空機に燃料を補給する。
- RUNWAY ATTACK(滑走路攻撃)。地上攻撃に特化したもので、航空機が攻撃軸を目標とする滑走路の長さに沿って自動的に配置することができる。これは、滑走路妨害兵器を展開する際に最も有効である。そのためには、Targeting areaを攻撃する飛行場の上に設定し、Target CategoriesからAirfieldsを選択します。
- SEAD(Suppression Of Enemy Air Defenses)。CASタスクと同様に、このミッションタスクでは、攻撃機をより専門的な役割で使用し、対レーダーミサイルやその他の武器タイプで敵の防空サイトを攻撃することができます。
- 輸送。輸送タスクに割り当てられた航空機は、敵軍に対する積極的な行動には参加せず、ただルートをたどるだけである。敵の攻撃の脅威にさらされた場合、航空機はそれを回避しようとする。
UNIT ユニットの選択は2つのフィールドで構成されており、フライトグループに含まれる航空機ユニットの数を選択できます(1~4)。右側のフィールドはグループ内の飛行機の総数を設定するためのもので、設定するには左右の矢印ボタンを使用します。左側のフィールドは、グループ内の飛行機を選択するためのもので、左右の矢印キーを使って選択します。
DCS Users Manual (5) DCS Users Manual (7)