このチュートリアルで紹介する標準ターミナル・ルートは、ROA ~KRDU です。ダーラム・インターナショナルで公表されている手順は以下の通りです。使用する手順はVNAVとRNAVの両方を使い習得します、私もまだ解りませんが勉強して行きます、G1000の計器設定はゼロから始めます。出発先はROANOKEにして機体を滑走路上に駐機してください。この滑走路から離陸開始です、長丁場になります貴方も私と練習して習得しましょう。
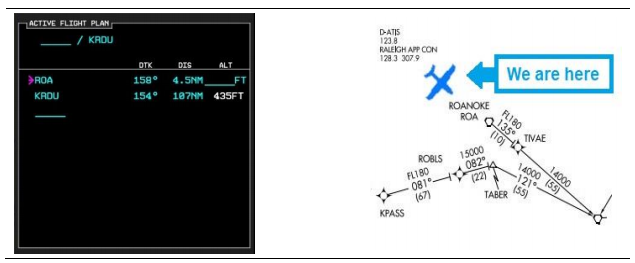
一番最初に簡易飛行計画のアプローチフェーズとしてG1000にプランとしてプログラムに組み込まれた内容です、ここから始まります。ご覧の様に、ウェイポイントは<ROA>ウェイポイントと<KRDU>ウェイポイントを使用しています、悩みながら始めるのは私と貴方には非常に有効です資料を訳しながら進めて行きます、途中は動画も使います皆さん宜しくね!
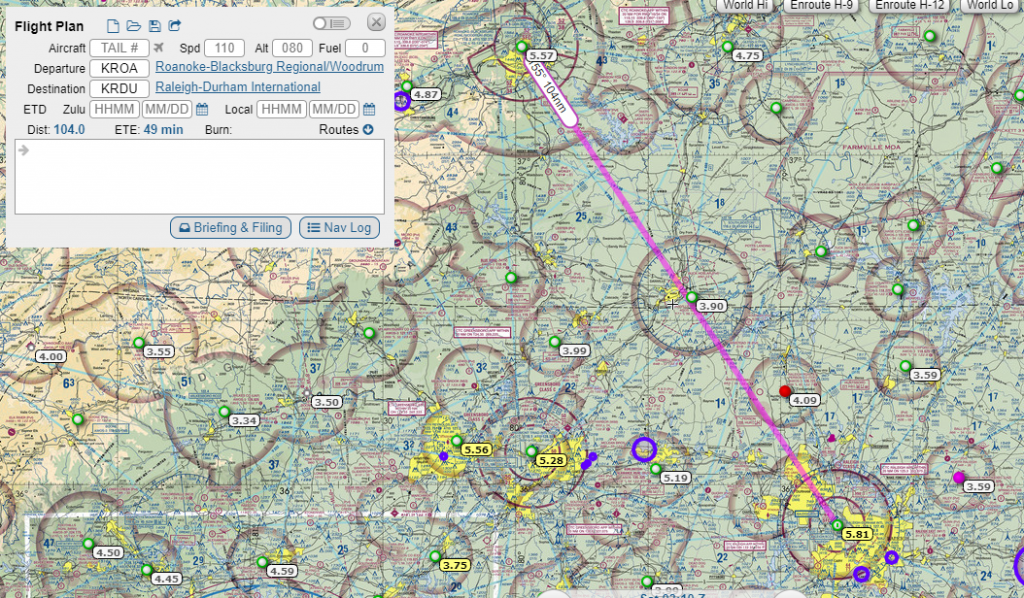
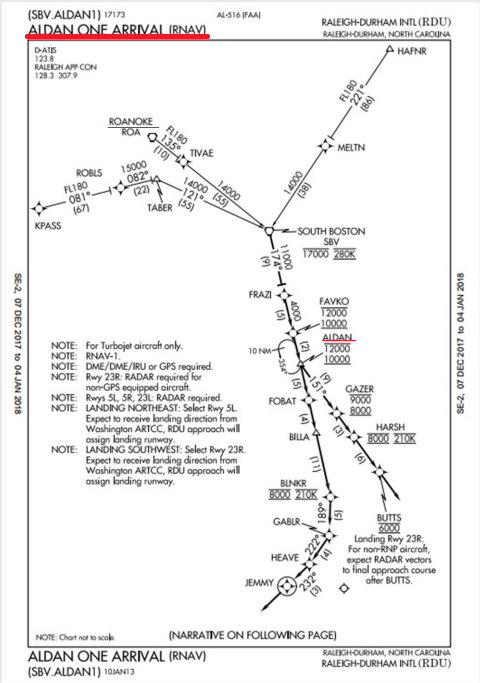
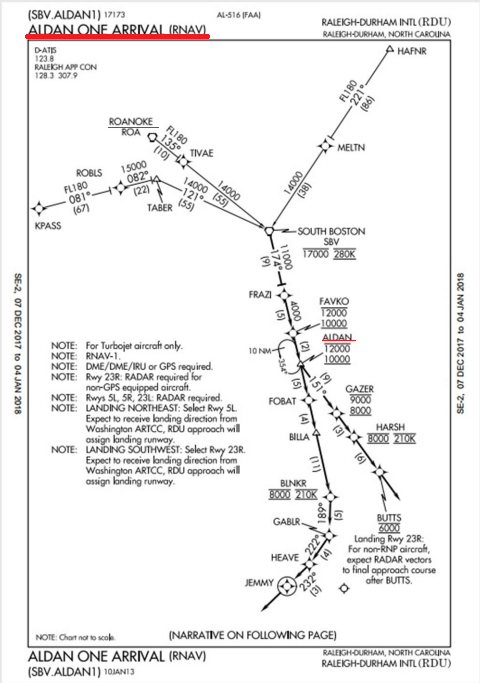
使用するエンル-トです
上記図の中に到着空港が有るのですが目で確認して置いて下さい、機体は左上面にあり飛行方向はウエイポイント<TIVAE>に向かっています。

操作ボタンの意味 PROC=手順編集画面を表示 FMS=表示された項目を選択

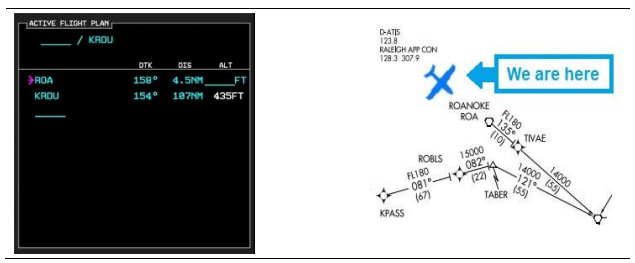
上記の図の中にALDANと言う空港が確かに有ります、下記の図には近い位置に有る到着可能な空港の一覧が表示されているのが理解できます、この中から目的地を選択するのですね!

利用可能な空港及びウェイポイントです
大きい二重丸が利用可能な空港で小さい丸が同じく利用可能なウエイポイントです。注意して見て下さい(この様な物は動画では理解できません、貴方はそう思われませんか?)。

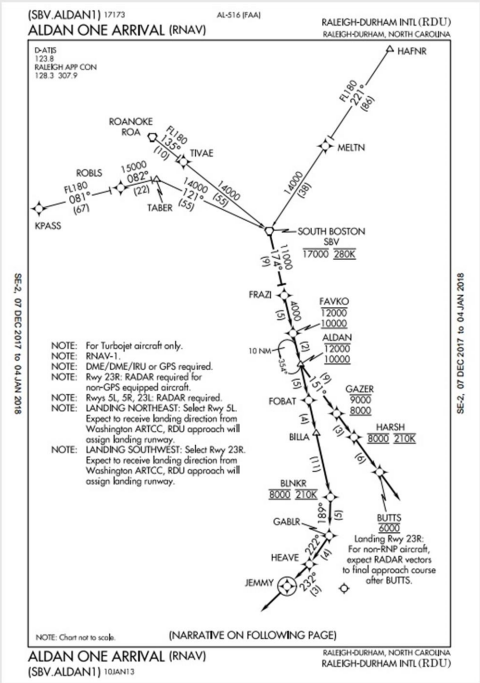
画面右側に表示されているコメント欄に注目してください、画面上側には白字でAIRPORTのコメントがありその下にはこの空港の情報が表示されています基本的に白字で記載されて有る文字はコメントで変更できない文字で,この情報は色々なプロセスでその都度変化します。


VOR(TIVAE /FAVKO)はエンル-ト上に確かに記載が有りますから見て確認してください。基本的な仕組みを理解しなければいけないと思います(104)。
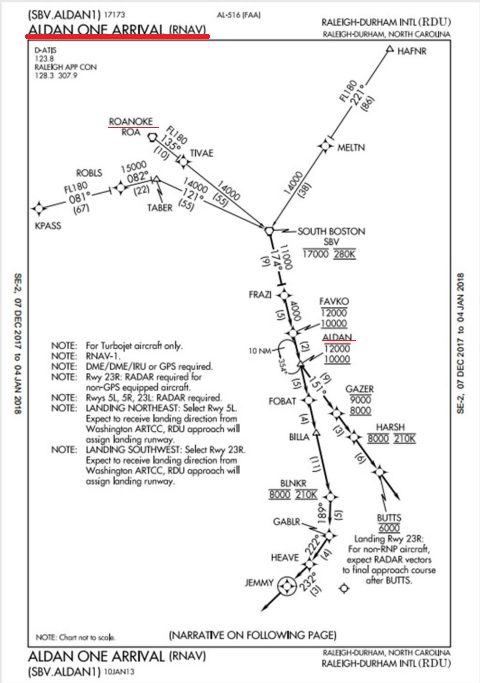
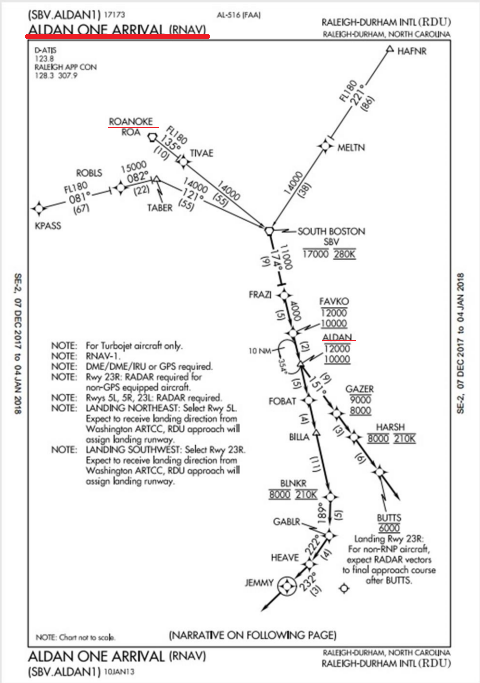
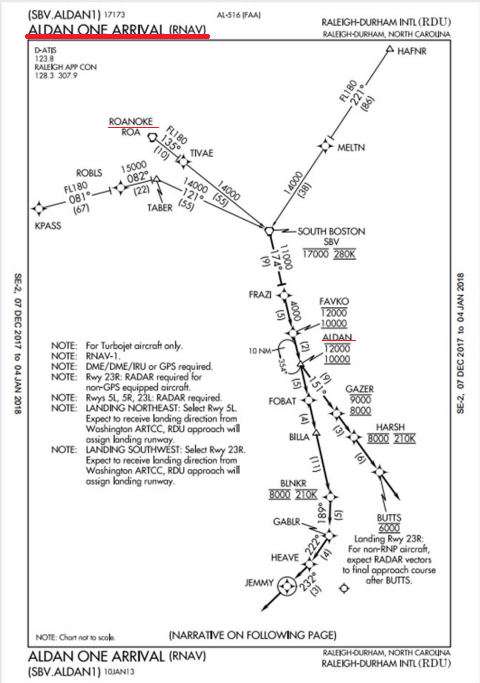
到着空港の資料です

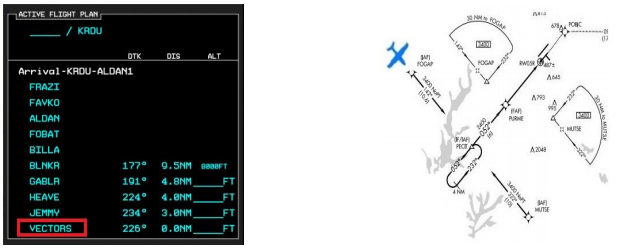
赤い範囲にある名前をよく見て下さい下のエンロール図に記載が有るのが解りますか?(飛行高度も指定されていますね!)これは着陸に向けて高度を所定の高度に降下する手順です、その飛行高度を設定する箇所でシ-ケンスとコメントが有ります各VORに於ける許容された飛行高度を設定する箇所になりますがまだまだ早すぎます、此処に高度設定項目が有るのを是非記憶して置いてください。
Waypoint Altitudes
ACTIVE FLIGHT PLANのページでは、ALT(高度)の欄に4種類のカラーコードとフォントの組み合わせを使用しています。

下記図は上記赤い枠内を書き出し
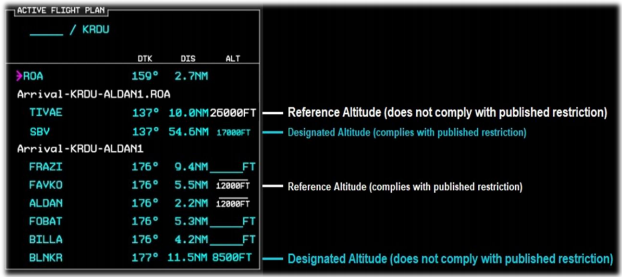
- 白いフォントは「基準高度」を示しています。これはパイロットに情報を提供しますが、VNAVプロファイルの一部ではありません。飛行計画書に記載されています。
- 青色のフォントは「指定高度」を示しています。フライトプランのVNAVプロファイルはこの高度を使用しています。ウェイポイント。
- 小さなフォントは、高度が指定されたウェイポイントで公表されている制限に準拠していることを示しています。
- 大きなフォントは、高度が指定されたウェイポイントで公表されている制限に準拠していないことを示しています。
Designating a Waypoint Altitude
飛行計画のウェイポイント高度を(白いフォントの)’基準高度’と(青いフォントの)’指定高度’の間で切り替えることができます。

FMS ロータリーの中央をクリックしてカーソルをアクティブにします。
- FMSロータリーを使用して、目的のウェイポイントの横にある高度フィールドを強調表示します。
- ENT (Enter) キーをクリックします(106)。
Current VNV Profile
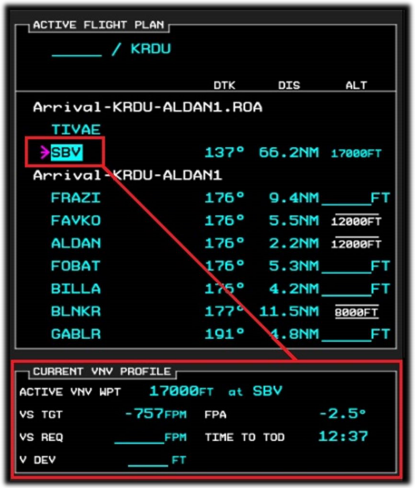
”CURRENT VNV PROFILE” パネル
内に”サウスボストン-SBV”の詳細を表示しています。
Setting the Flight Path Angle
アクティブなウェイポイントの(下降)フライトパスアングル(FPA)を調整することができます。FPAを変更すると、VS TGT(ターゲット垂直方向の速度)を設定すると、自動的に再計算されます。

- VNV PROF (VNAVプロファイル) ソフトキーをクリックします。
- FMS(内側)ロータリーを使用して、1 度の 10 分の 1 単位で FPA を上下に調整します。
Setting the Vertical Speed Target (VS TGT)
アクティブなウェイポイントの(下降)垂直速度目標(VS TGT)を調整することができます。VS TGTを変更すると、フライトパスアングル(FPA)、これは自動的に再計算されます。

VNV PROF (VNAVプロファイル) ソフトキーをクリックします。
- FMS(外側)ロータリーを使用して、VS TGT を強調表示します。
- FMS(内側)ロータリーを使用して、VS TGT を毎分 100 フィート単位で上下に調整します。
PFD Flight Plan Target Altitude
現在のウェイポイントのVNAV高度がPFDに表示されます。これは右上に表示されているマゼンタ色の値です、標高目盛のステイタスコーナーです。

Calculation of Required VS (VS REQ)
ウェイポイントまでの残り時間が1分以内の場合は、必要垂直速度(VS REQ)と垂直方向の偏差を表示します。(VDEV)を自動計算し、リアルタイムで連続的に更新します。

| VS TGT | TARGET Vertical Speed | VNAV高度を達成するために必要な垂直方向の速度での所望の飛行経路角現在の対地速度。 |
| VS REQ | REQUIRED Vertical Speed | VNAV高度に到達するのに必要な垂直方向の速度は指定されたウェイポイントオフセット)を予め設定された高度に設定します。 |
| V DEV | Vertical Speed DEVIATION | 目的のフライトからの垂直方向の偏差パス(フィート)で表示されます。 パイロットがVS TGTに固執している場合、この値は静止したままになります。 パイロットがVS REQに固執すると、このに到達すると、値はゼロになります。 指定されたウェイポイントオフセット)を使用しています。 |
| FPA | Flight Path Angle | フライトパスの設定、表示に使用します。 指定されたウェイポイントに対しての角度ウェイポイントオフセット)。 |
| TIME TO TOD | Time to TOP OF DESCENT | の先に所望の飛行経路がある場合の現在の位置は、飛行経路のインターセプトまでの残り時間。 |
| TIME TO BOD | Time to BOTTOM OF DESCENT | 降下している場合所望の飛行経路を選択した場合は、この時点でレベリングオフ前の下降距離。 |
PFD V-DEV and VS-TGT Chevrons
標高目盛の左と右に目標垂直速度(VS TGT)と垂直速度偏差(V DEV)はPFD上にマゼンタのシェブロンで表示されます。


Placing the Autopilot in VNAV Mode

PFD には VPTH (Vertical Path) ARM 赤枠内に表示されます。
Top of Descent
頂上降下(TOD)では、アクティブなウェイポイントのVNAVプロファイルに従って、オートパイロットが降下を開始します。垂直速度はの値は自動操縦で決定される所望の飛行経路角(FPA)を守るために必要なもので、この場合は-3.5度が適切となります。

指示されたモードがALTVの場合、オートパイロットはVNAV高度でレベルオフします。
- 指示されたモードがALTSの場合、オートパイロットは選択された高度でレベルオフします。
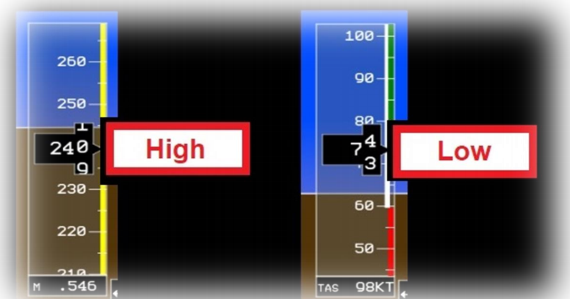
Managing Airspeed
シーラスを含め、多くの航空機にはオートスロットルが装備されていません。パイロットは対気速度を手動で管理する責任があります。
オートパイロットが制御している場合でも。これは、自動操縦がVNAVフライトプランに結合されている場合に重要です。パイロットは以下のことに注意しなければなりません。
下降中に対気速度が高くなりすぎたり、自動操縦士がレベルオフした後に対気速度が低くなりすぎたりしないようにするためです。
自動操縦士がALTVを表示した場合は、パイロットが選択した高度よりも早くレベルオフすることを意味します。
スロットルを進める準備ができていて、この場合は飛行機が遅くなりすぎないようにしてください。
Changing a Waypoint Designated Altitude
ATCがパイロットに特定のウェイポイントの高度を変更するよう指示した場合、それに応じて飛行計画を変更することができます。
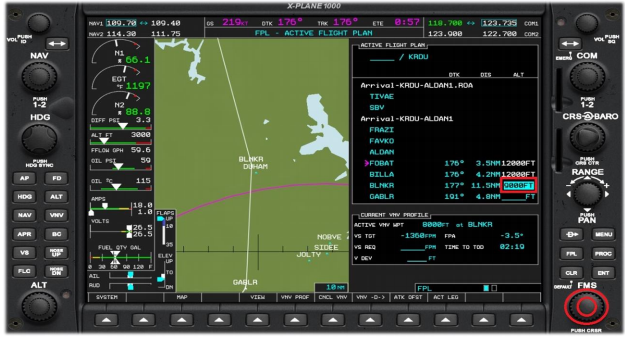
- FMS ロータリーの中央をクリックしてカーソルをアクティブにします。
- FMS(外側)ロータリーを使用して,目的のウェイポイントを強調表示します。
- FMS(内側)ロータリーを使用して、高度を増加または減少させます。
この例では、高度はパイロットによって9,000フィートに設定されています。青色の大きなフォントは、これがDESIGNATED (VNAV)であることを示しています。その手順のために公表されている高度に準拠していない高度を使用してください。
VNAV Direct-To Waypoint
VNV -D-> (VNAV Direct) ソフトキーを使用すると、いつでも特定のウェイポイントで中間的なウェイポイントへのVNAV降下を開始することができます。

PFD の高度バグがこの指示と矛盾していないことを確認してください。衝突がある場合は、それに応じて高度バグを小さくしてください

Re-Computing the VNAV Profile
VNAVディセント中に、VNV -D-> (VNAV Direct) ソフトキーを使用してVNAVプロファイルを再計算することができます。高度が変更されました。
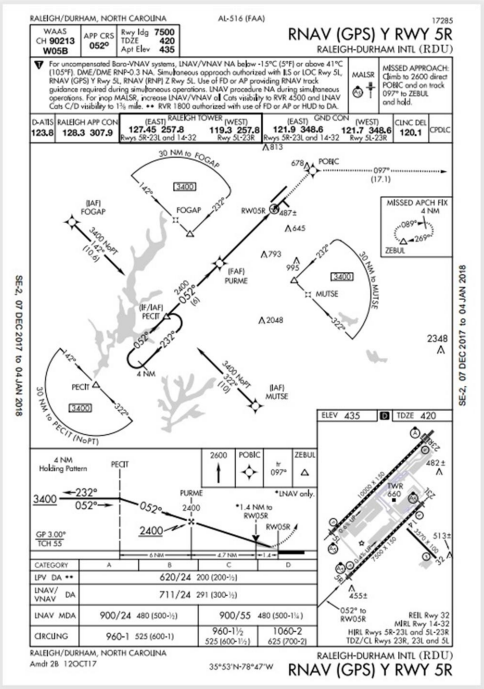
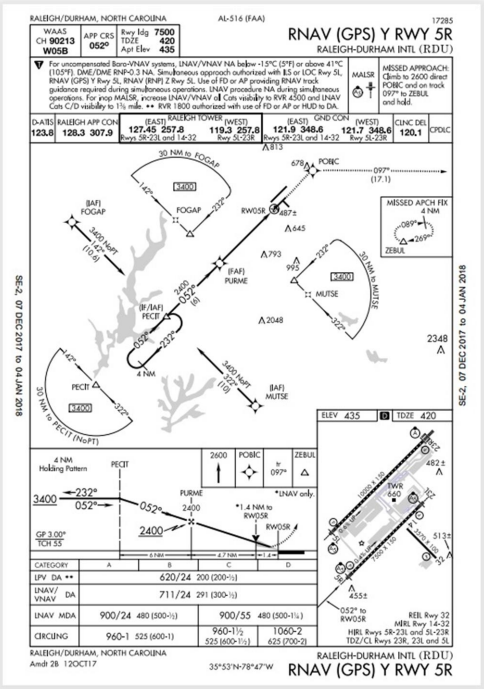
RNAV (GPS) Y RWY 5R APPROACH
このチュートリアルで実証されたアプローチは、RNAV(GPS)Y RWY 5R APPROACH into KRDU Raleigh Durham Internationalです。
公開されている手順を以下に示します(121)。
Programming the RNAV (GPS)

PROCEDURES(プロセス)」ページを起動するには、Proc ソフトキーをクリックします。
- FMS ロータリーを使用して,「SELECT APPROACH」をハイライト表示します。
- ENT(Enter)キーをクリックします。
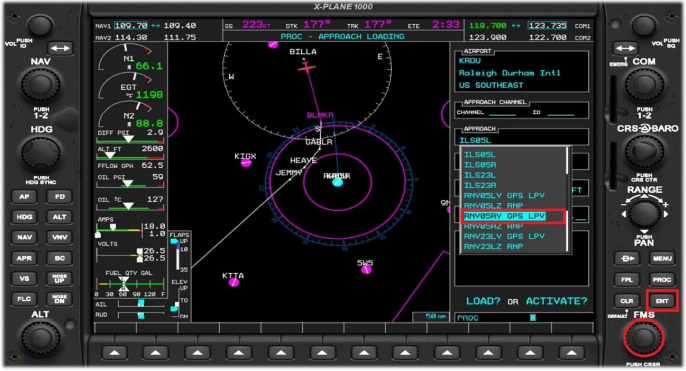
FMS ロータリーを使用して、「RNV05RY」を強調表示します。
- ENT (Enter) キーをクリックします。
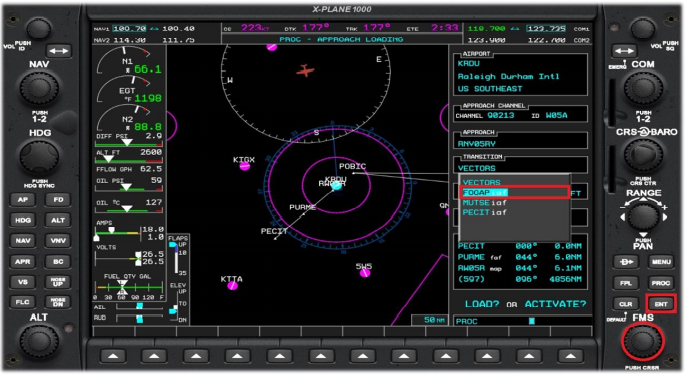
- FMSロータリーを使用して、「FOGAP」を強調表示します。
- ENT (Enter) キーをクリックします。
- 「IAF」の開始点をインタ-セプトします。

FMSロータリーを使用して「RW05R」を強調表示する
- ENT (Enter) キーをクリックします。
Programming the Decision Altitude
これは、垂直誘導によるローカライザーLPVのアプローチとなります。

- FMS(内側)ロータリーをクリックして、MINIMUMSボックスで「BARO」を選択します。
- ENT (Enter) キーをクリックして高度をハイライトします。

FMS(内側)ロータリーを使用して、MINIMUMS 高度を620FTに設定します。
- ENT (Enter) キーを 2 回クリックしてアプローチをロードします。
Automatic Designation of Altitudes prior to Final Approach
最終接近固定(FAF)前の高度は自動的にデザインされます(青)。それ以降の高度はデフォルトではREFERENCEのみです。これは、垂直方向のガイダンスが、最終的なアプローチ・フィクスで、あるいはそれを超えて、他の方法によって提供されるからです。良い例としては、ILSアプローチがあります。

パイロットがアプローチをアクティブにすると、デザインされた高度のウェイポイントのVNAVプロファイルもアクティブになります。
Activating the Approach
ALDAN1の到着は、最初のアプローチフィックスへのATCベクトルを特徴としており、この時点でアプローチを開始する必要があります。シミュレーションするにはこれで、すぐにアプローチを開始して、ベクターを迂回します。

PROCキーをクリックします。
- FMSロータリーを使用して、「ACTIVATE APPROACH」を選択します。
- ENT (Enter) キーをクリックします。
At the Final Approach Fix
最終的なアプローチフィックス(PECIT)でVNAVが離脱し、グライドスロープインジケーターがV(VNAV)+シェブロンからG(グライド)に変化します。
パス) +ダイヤモンド。水平状況インジケーター(HSI)は、垂直方向のガイダンスでローカライザーのパフォーマンスを持っていることを確認しています。
LPV)の感度。後者が確認されなかった場合(LPVではなくLNAV+V)、最小値を変更する必要があります(711フィートまで)。


- APR (Approach) ボタンをクリックしてグライドパスをキャプチャーします。
VNAVモードとは異なり、グライドパスモードはオートパイロットのバグ高度を上書きします。を避けるためにパイロットが調整する必要はありません。
競合しています。
最終的なアプローチの修正までにパイロットは、アプローチガイダンスが正しいことを確認し(この場合はLPV)、モードアナンシエータが期待通りであることを確認します(この場合はGP)(130)。
At Minimums
最低高度(620フィート)で進めない場合は、パイロットは出力を上げて上昇率を上げ、ギアを引っ込めてフラップを開き、ミスアプローチを実行します。
最小値を超えると、PFDモードはサスペンドモードに切り替わります。パイロットは機体をコントロールしています。

Activating a Missed Approach
PROCキー/プロシージャーメニューを使用して、ミスしたアプローチをアクティブにすることができます。
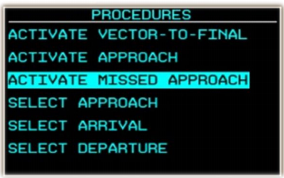
しかし、状況の緊急性から、ミスアプローチを発動させるために、より迅速な方法が提供されています。

- SUSP(サスペンド)ソフトキーをクリックして、ミスアプローチ手順を起動します。
注:TO/GA(テイクオフ/ゴーアラウンド)ボタンが装備されている航空機では、TO/GAボタンをトリガーするとミスアプローチ(132)
VNAVに関してはこれで全てです、これ以下でもこれ以上でも有りません。今後の貴方は実際に経験を積むだけです頑張って下さい、あ!それから今後は一般公開されている動画を見ても驚くほど理解が出来るとおもいますよ!
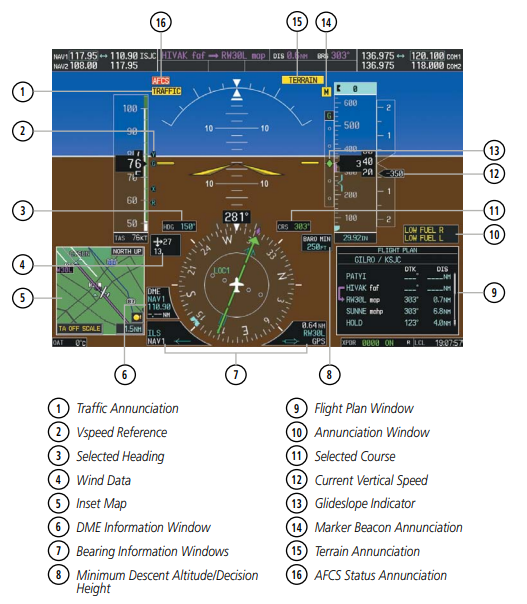
VNAV 航法チュトリアル [MFD] Direct To(awaypoint) Autopilot Panel [PFD and MFD]
[PFD]Primary Flight Display [PFD]AUTOPILOT OPERATION [MFD] Flight Plans