Programming the RNAV (GPS) Y RWY 5R APPROACH
PROCEDURES(プロセス)」ページを起動するには、Proc ソフトキーをクリックします。
- FMS ロータリーを使用して、<<SELECT APPROACH>>をハイライト表示します。
- ENT(Enter)キーをクリックします(122)。

PROCEDURES(プロセス)」ページを起動するには、Proc ソフトキーをクリックします。FMS ロータリーを使用して,<<[SELECT APPROACH>>をハイライト表示しますENT(Enter)キーをクリックします。
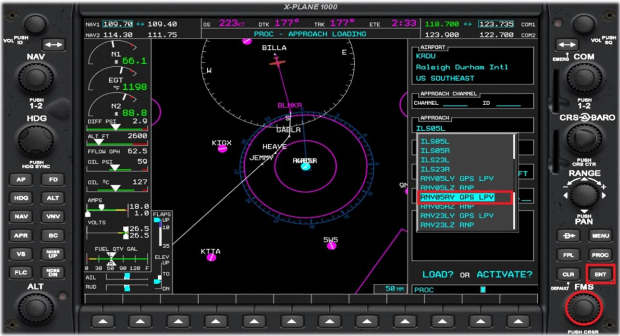
FMS ロータリーを使用して、「RNV05RY」を強調表示します。
- ENT (Enter) キーをクリックします。

FMSロータリーを使用して、「FOGAP」を強調表示します。
- ENT (Enter) キーをクリックします。

FMSロータリーを使用して「RW05R」を強調表示する
- ENT (Enter) キーをクリックします。
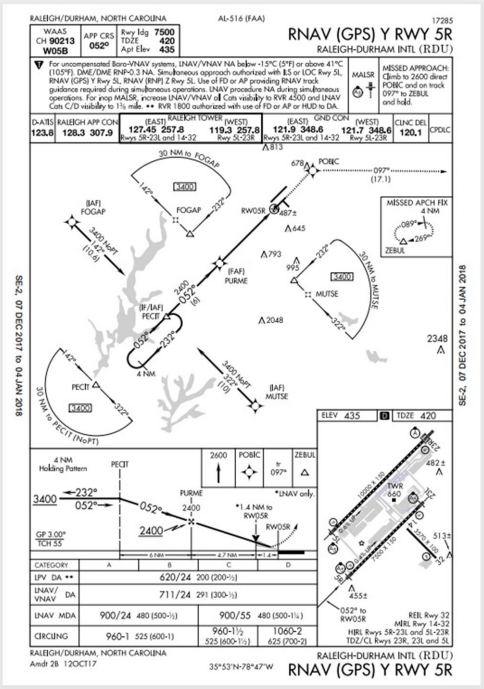
Programming the Decision Altitude
これは、「垂直誘導によるローカライザー性能」(LPV)のアプローチとなります。
決定高度をプログラムするには::

- FMS(内側)ロータリーをクリックして、MINIMUMSボックスで「BARO」を選択します。
- ENT (Enter) キーをクリックして高度をハイライトします。
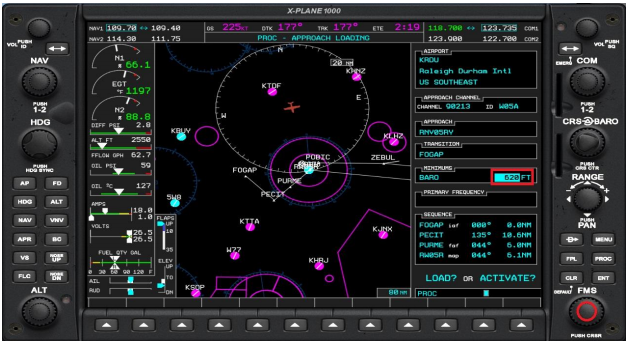
FMS(内側)ロータリーを使用して、MINIMUMS 高度を 620 FT に設定します。
- ENT (Enter) キーを 2 回クリックしてアプローチをロードします。
Automatic Designation of Altitudes prior to Final Approach
最終アプローチ固定(FAF)前の高度は自動的にデザインされます(青)。それ以降の高度はデフォルトではREFERENCEのみです。これは、垂直方向のガイダンスが、最終的なアプローチ・フィクスで、あるいはそれを超えて、他の方法によって提供されるからです。良い例としては、ILSアプローチがあります。

パイロットがアプローチをアクティブにすると、デザインされた高度のウェイポイントのVNAVプロファイルもアクティブになります。
Activating the Approach
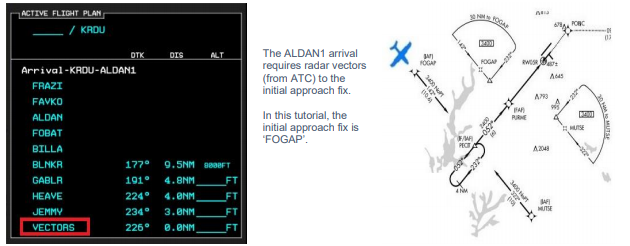
ALDAN1の到着は、最初のアプローチフィックスへのATCベクトルを特徴としており、この時点でアプローチを開始する必要があります。シミュレーションするにはこの場合、すぐにアプローチを開始して ベクトルを迂回させます。

PROCキーをクリックします。
- FMSロータリーを使用して、「ACTIVATE APPROACH」を選択します。
- ENT (Enter) キーをクリックします。
At the Final Approach Fix
最終的なアプローチフィックス(PECIT)でVNAVが離脱し、グライドスロープインジケーターがV(VNAV)+シェブロンからG(グライド)に変化します。パス +ダイヤモンド,水平状況インジケーター(HSI)は、垂直方向のガイダンスでローカライザーのパフォーマンスを持っていることを確認しています。
LPV)の感度。後者が確認されなかった場合(LPVではなくLNAV+V)、公表された手順に従って最小値を変更する必要があります(711フィートまで)。

APR (Approach) ボタンをクリックしてグライドパスをキャプチャーします。
VNAVモードとは異なり、グライドパスモードはオートパイロットのバグ高度を上書きします。を避けるためにパイロットが調整する必要はありません(129)。
競合しています。
VNAV 航法チュトリアル [MFD] Direct To(awaypoint) Autopilot Panel [PFD and MFD]
[PFD]Primary Flight Display [PFD]AUTOPILOT OPERATION [MFD] Flight Plans