
1::AP(自動操縦モ-ド)
これはトグルボタンで、それぞれ自動操縦システムの作動と解除に使用されます。
オートパイロットが最初に作動しても、パイロットは完全に手動で機体をコントロールすることができますが、その理由は以下の通りです。
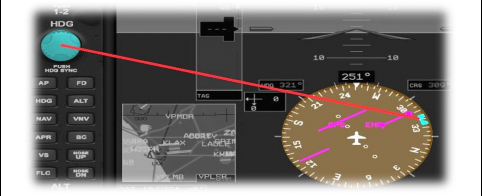
2::HDG(進行方向角度モード)
これはトグルボタンで、それぞれヘディングモードを有効にしたり無効にしたりします。
このモードがオンになっていると、オートパイロットはパイロットが選択 した方位に機体を旋回させます。
パイロットは、HDGロータリーコントロールを使用して、必要なヘッディングを選択することができます。
“Horizontal Situation Indicator(HSI)”の外周に表示される “Heading Bug”。
3::NAV(プログラム モ-ド)
G1000が現在 “GPS “モードの場合(CDI キーで制御)、これを選択します。
自動操縦モードは航空機を指示します横方向に、任意のプログラムに従ってフライトプランG1000が「VOR」または「LOC」モードの場合(CDI キーで制御)、これを選択します。オートパイロットモードにすると、航空機の飛行を指示します。

4::APR(アプローチモード)
このモードを選択するとアプローチモードになります。
オートパイロットは選択されたアプローチに関連したグライドパスを捕捉します。
注意:大幅な偏差がある場合、オートパイロットは捕捉しないことがあります。そのため、航空機は
このモードに入る前に、適切な位置に配置してください。
5::VS(垂直速度モード)
このモードを選択すると、現在の垂直速度(VS)をキャプチャして保持しながら
新しい高度になります。垂直速度は、対気速度(IAS)を犠牲にして自動操縦で優先されます。
オプションで、レベルオフ高度を指定することもできます(「ALT」ロータリーコントロールを使用)。オートパイロットは
はこの高度でレベルオフし、それに応じて VS モードが解除されます。

VSモードでは、安全な対気速度を維持するために注意が必要です。選択された速度上昇/下降時の対気速度が航空機の性能を超える場合があります。
低すぎたり、高すぎたりします。パイロットはこれを手動で管理しなければなりません。
6::FLC(フライトレベル変更モード)
このモードを選択すると、現在の対気速度(IAS)を捕捉して保持しながら、新しい対気速度に変更することができます。高度を優先します。対気速度は、垂直速度を犠牲にして自動操縦で優先されます。
オプションで、レベルオフ高度を指定することもできます(「ALT」ロータリーコントロールを使用)。オートパイロットはこの高度でレベルオフし、それに応じて FLC モードが解除されます。
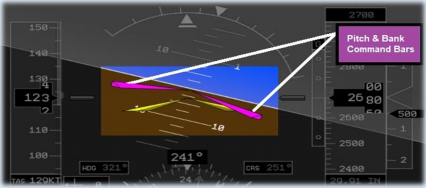
7::FD(フライトディレクター(表示))
このキーを使用して、「フライトディレクター」の表示のオン/オフを切り替えます。
フライトディレクターは、航空機に必要な適切なピッチとバンク角を計算して表示します。
をクリックして、希望するフライトプランに従ってください。オートパイロットが作動しているときは、フライトディレクターのピッチとバンクコマンドバー(下記参照)は、次のようになります。
常に表示されます。ただし、自動操縦が解除されているときは、これらの表示をオンまたはオフに切り替えることができます。ピッチとバンクコマンドバーを使ってパイロットは手動で飛行計画に沿って機体を飛行させることができます。
8::ALT(高度モード)
現在の高度を保持するには、このモードを選択します。これは、VS モードを使用しても可能です。
例(VSが’00’に設定されている場合)。
9::VNV(垂直ナビゲーション(VNAV)モード)
このモードを選択するとVNAVモードになります(フライトプランが存在し、アクティブなウェイポイントが
VNAV指定の高度が存在します)。RNAV/VNAVチュートリアルを参照してください。
10::BC((ローカライザ) バックコースモード)
いくつかの空港では、両方向に同じ物理的な滑走路を提供するために、ILS ローカライザーが存在します。
これをフロントコース、バックコースと呼びます。
ローカライザーのバックコースを使用して滑走路に接近する際には、コース逸脱指標(CDI
これを補うために、パイロットはBC(バックコース)モードを選択することができます。
フライトディレクターをオンにした状態で、BCをクリックすると、ローカライザーのバックコースモードが有効になります。
逆送でローカライザー信号を迎撃します。
このボタンが装備されていない飛行機では、バックコースモードは
インターセプト角>105度でのローカライザ。
11::Nose Up(ノーズアップ)
自動操縦士がVSモードの場合、このキーを使用して上昇率を上げます。オートパイロットがPITモードの場合、このキーでピッチ姿勢を増加させます。自動操縦士がFLCモードの場合、このキーを使用して目標対気速度を低下させます。
12::Nose Down(ノーズダウン)
自動操縦士がVSモードの場合、このキーを使用して下降速度を上げます。オートパイロットがPITモードの場合、このキーでピッチ姿勢を下げます。自動操縦士がFLCモードの場合、このキーで目標対気速度を上げます(95)。
Using the Autopilot with a VOR

ナビ1またはナビ2の周波数を目的のVOR1局にチューニングします。
- CDI ソフトキーをクリックして VOR1 または VOR2(ナビ 1 またはナビ 2 でチューニング)を選択します。
- 3 時または 9 時の位置で CRS ロータリーをクリックして、VOR に希望のコースを設定します。
- これでHSIは、希望するラジアルに対する自機の位置を表示します。上記の例では、選択されたラジアル
は360度であり、航空機は現在、このラジアルの右に位置して180度のコースを飛行するように
VOR」です。 - NAV」キーをクリックして「Navigation」モードを選択します。オートパイロットは適切なコースを選択して迎撃します。
所望のラジアルを設定します。この例では、選択されたコースは153度です。 - ラジアルインターセプトが近くなると、オートパイロットは徐々にコースを調整してスムーズなインターセプトを行い
注:ディスプレイベゼル上部に白色で表示される VOR 表示は、自動操縦士が「武装している」ことをパイロットに指示し、待機していることを示します。
注:ディスプレイベゼルの上部に白色で表示される VOR 表示は、パイロットに自動操縦が「武装」していることを指示し、待機していることを示しています。
を使用して、針が生きてくるとすぐに信号をキャプチャして追跡し、その時点で表示が緑色で表示されます。
Using the Autopilot with an ILS Approach
自動操縦機は、ローカライザー信号とグライドスロープを迎撃して追尾することができます。

- ナビ1またはナビ2の周波数を目的のローカライザーにチューニングします。
- CDIソフトキーをクリックしてLOC1またはLOC2(ナビ1またはナビ2で調整)を選択します。
- HSI は、選択されたローカライザーに対する航空機の位置を表示します。上記の例では、航空機は
をローカライザーの右に配置すると、自動操縦は左に舵を切って迎撃します。 - NAV」キーをクリックして「Navigation」モードを選択する。自動操縦士はローカライザーを滑走路のしきい値まで追跡します。航法モードを使用している時に、コース偏差が大きくない場合に限ります。
- APR」キーをクリックして[アプローチ]モードを選択する。自動操縦士がローカライザーを追跡し、滑走路まで滑空します。航法モードが作動している時にコース偏差が大きすぎない場 合には、しきい値が設定されています。
注記: ディスプレイベゼルの上部に白で表示されたLOC表示は、パイロットに 自動操縦が “アームド状態 “であることを指示しています。針が生き返るとすぐにローカリゼーションを捕捉して追跡し、その時点で表示は緑で表示されます。
注:ディスプレイベゼルの上部に白で表示される GS 表示は、パイロットに自動操縦が「武装」されていて、次の操作を待っていることを指示します。
針が生き返るとすぐにグライドスロープをキャプチャして追跡し、その時点で表示が緑色で表示されます。
VNAV 航法チュトリアル VNAV 航法チュトリアル [MFD] Direct To(awaypoint)
[PFD]Primary Flight Display [PFD]AUTOPILOT OPERATION [MFD] Flight Plans