
いや~DCSー>>Spitfiger>>F18C>>steam>>TacVew>>……….と覚える事が多すぎます。なんでこの年でこんなに頭を使わなければ行けないのでしょうか?私は凄く疑問に感じています(笑い)認知症にはなれないのでしょうね!しょうが有りませんが!ね。でもマニュバ-とか色々と研究が出来る事が素晴らしいです。IL2の時代ではないのかもしれませんね!皆さんはどう思いますか?あ!そういえばCGtraderで航空母艦赤城が販売されました定価は日本円で32000円です、ハンガリーの方が購入されました。
DCSでのTacVew起動画面
記念すべき日です
今日F18Cを始めてエンジンを掛けてから離陸しました、此処まで2週間かかりました、IL2は長年遊んできましたがF18Cは非常に困難であることを事を理解しています、いや~楽しいですね何時の日かオンラインでマルチでドッグファイトが出来る日を想像して頑張ります、毎日が日曜日見たいな物なので至って気楽な人生です(笑い)。TacVewも有るのでマニュバ-の研究にも役に立ちます。
問題は右エンジン起動後から
右エンジンを始動後の手順
左右のDDIとMPCD、HUDパネルの電源をいれる
ALTSWノブがAUTOになっているのを確認
Bleed Airを右に360度回転する
センサ-パネルのINSノブをGND位置に
DDIに右エンジンの警告がでていないのを確認します
左DDI下列中央のMENUボタンを押してSUPTページを開きます
右下列のボタンを押してFCSページを開きます
[X]これを消すにはのFCS RESETボタンを押します
右DDIの点滅を止めるには上の列のSTOPボタンを押します
此処で左エンジンを始動します
キャノピを閉めて下さい
左後方にあるOBOGSを入れて酸素を供給します
HooK BypassをFIELGIにします
フラップをAUTOにします
するとFCSの数値が0になります
地上ではAnyi SkidをONにして置きます
右DDIの左列上のボタンを押してFCS MCページを開きます
右DDIの左列上のFCS BITを押しながらY-キーを使って上げます
これでFCSのテストが始まります
自動的に動翼の作動試験えを行います、正常に終わればメッセ-ジが流れて来ます
次にトリムSWを押します
するとSTABの値が12度で固定されます
PITOTスイッチがAUTOなのを確認します
右下部の姿勢指示器のロックを解除します
レ-ダ高度計を200ftに設定します
RWR(レーダ警報受信機)の電源を入れます
ECMもSTBYにして置きます
MPCD中央下部い”OK”と表示されているのを確認します
INSノブをNAVに設定しRADARもOPRに設定します
SUPT TOP PAGE
•24NUを10NDに設定します。離陸トリムは12ツーNU STAB POSに設定されています。
•最大垂直加速度(Maximum vertical g) – 直近の着陸時に発生した最大垂直加速度。
•航空機重量 – 航空機総重量をポンド単位で四捨五入して表示します。
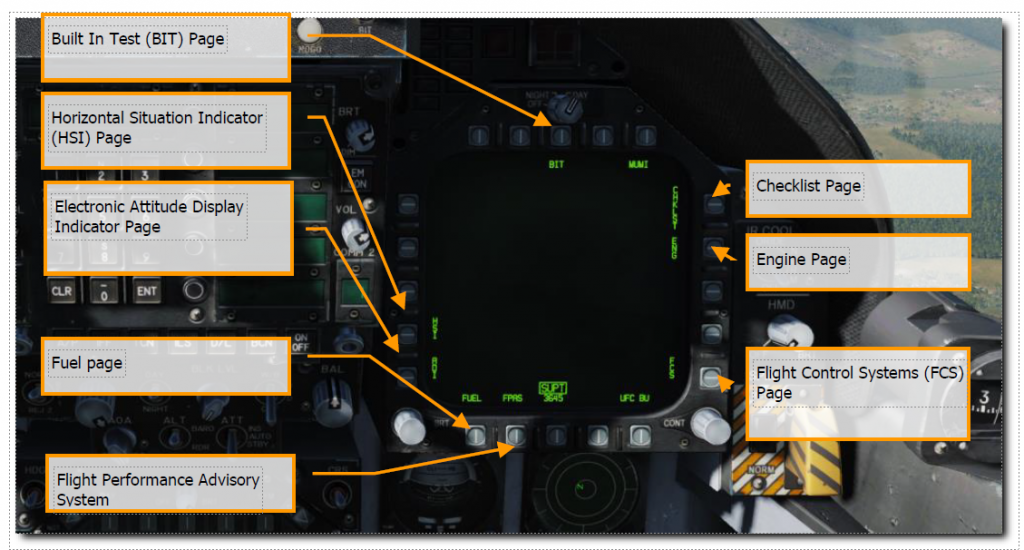
Built In Test (BIT) Page. ホーネットは多数のサブシステムで構成されており、それぞれにテストシステムが内蔵されています。このページでは、パイロットがこれらのシステムをテストし、その状態を確認することができます。

Horizontal Situation Indicator (HSI) Page. 主にMPCDに表示されますが、HSIはトップダウン式のナビゲーションディスプレイで、自機を中心に表示します。HSIについては、本ガイドのナビゲーションの部分で後述します。

MPCDに表示されている場合は、移動中の地図を投影することもできます。
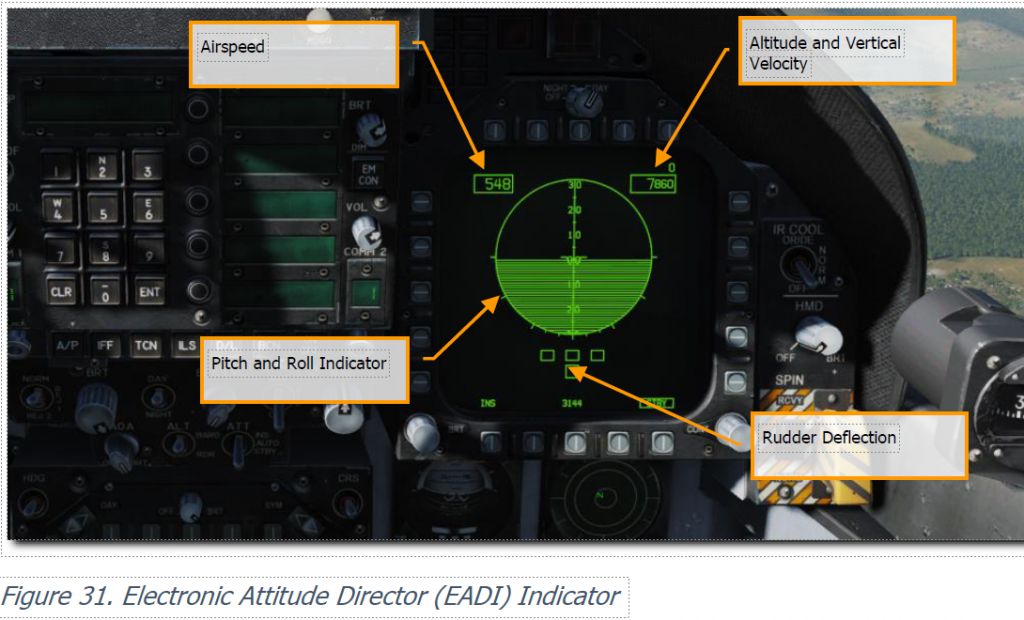
Electronic Attitude Director Indicator (EADI) Page. 電子式姿勢表示器は、HUD上の姿勢表示の代わりに、左右のDDIに表示することができます。天頂を表す小さな円がボールに表示され、直下を表す十字の円が表示されます。ピッチラダーは10°刻みで表示されます。ボールの下には、FCS のヨーレートを表示するターンインジケーターがあります。下のボックスがエンドボックスの下に位置するように移動すると、標準的なレートのターン(3°/秒)が表示されます。EADI ディスプレイは、MENU の ADI 押しボタンを押して選択します。
Fuel (FUEL) Page. 内部燃料の合計、内部燃料と外部燃料の合計、および現在選択されているBINGO燃料が表示されます。各タンクの右側には、タンクの燃料容量に対する利用可能な燃料の比率を示す可動キャレットが表示されます。あるタンクの有効な燃料量情報が失われた場合は、0ポンドの燃料が表示されます。
メニュー選択可能なFUEL表示は、飛行中および地上で利用可能です。表示されるのは、各タンクで利用可能な燃料、内部燃料の合計、内部燃料と外部燃料の合計、および現在選択されている
Flight Performance Advisory System (FPAS) .FPASは、現在の運航状況に基づいて、最大の機内燃費に対応する高度と対気速度をパイロットに通知します。FPASが提供する範囲と対気速度データは、SUPTメニューのFPAS DDIページに表示されます。ページは5つのデータエリアと2つの選択オプションに分かれています。
Check List (CHKLST) Page. このページでは、着陸・離陸時のチェックリストを提供しているほか、航空機の重量やスタビライザーの位置なども表示しています。
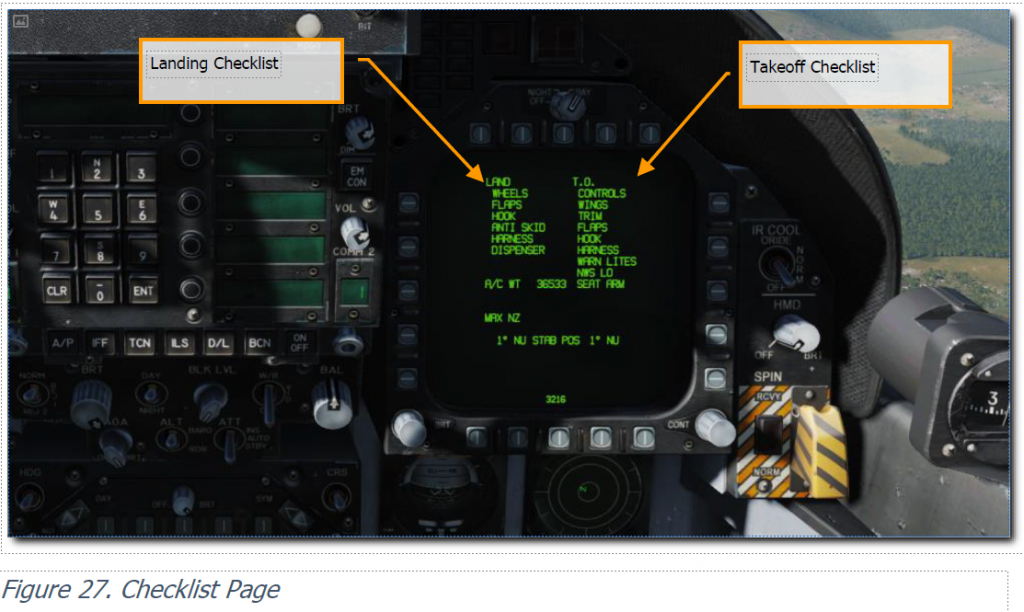
•24NUを10NDに設定します。
離陸トリムは12ツーNU STAB POSに設定されています。
•最大垂直加速度(Maximum vertical g) – 直近の着陸時に発生した最大垂直加速度。
•航空機重量 – 航空機総重量をポンド単位で四捨五入して表示します。
Engine (ENG) Page. エンジンページには、エンジン回転数、エンジン温度、燃料流量、油圧などのIFEIのエンジンデータと重複した重要なエンジン性能データが掲載されています。しかし、ほとんどの場合、エンジン性能をチェックするためにIFEI(Integrated Fuel / Engine Indicator)を使用することになります。
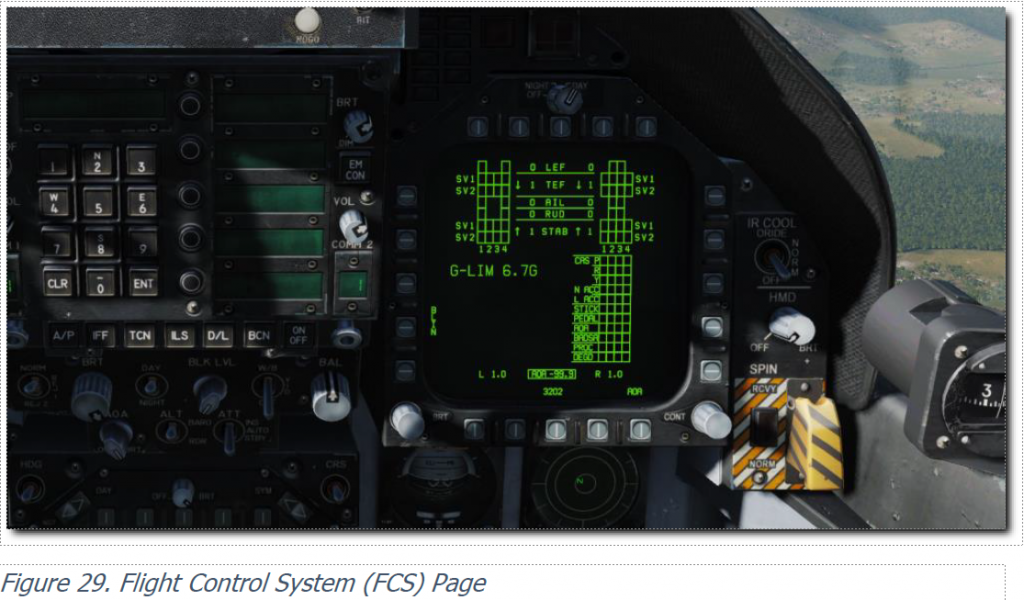
Flight Control System (FCS) Page. FCSページには、リーディングエッジとトレーリングエッジフラップ、エルロン、ラダー、スタビライザーなどのフライトコントロールサーフェスのモニタリングデータが表示されます。また、4つのチャンネルで指摘されたFCSエラーが「X」として表示されます。このページでは、航空機の総重量に基づくGリミットも表示されます。
TAC TOP PAGE
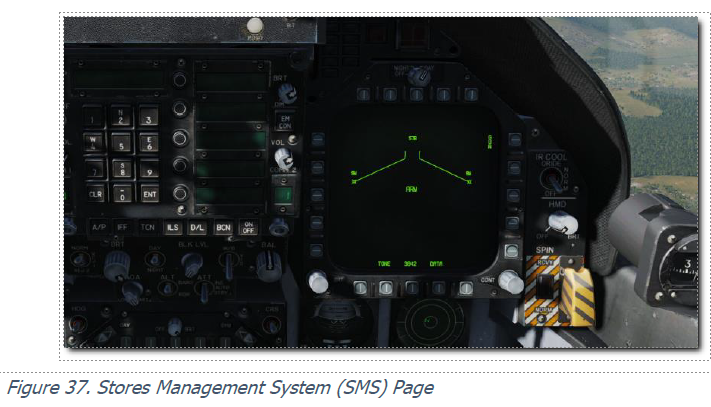
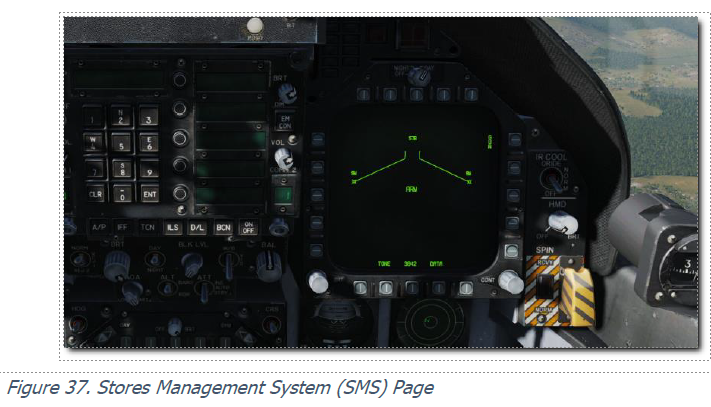
Stores Management System (SMS) Page. SMSページでは、ロードされたすべてのストアを表示し、その配信プロパティを決定することができます。
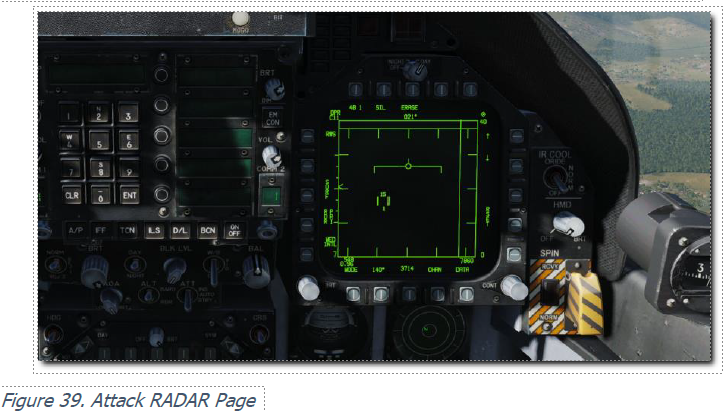
Attack RADAR (RDR) Page. この初期バージョンのホーネットアーリーアクセスでは、このページには空対空レーダーが表示されます。詳しくは本ガイドのRADARの項をご覧ください。

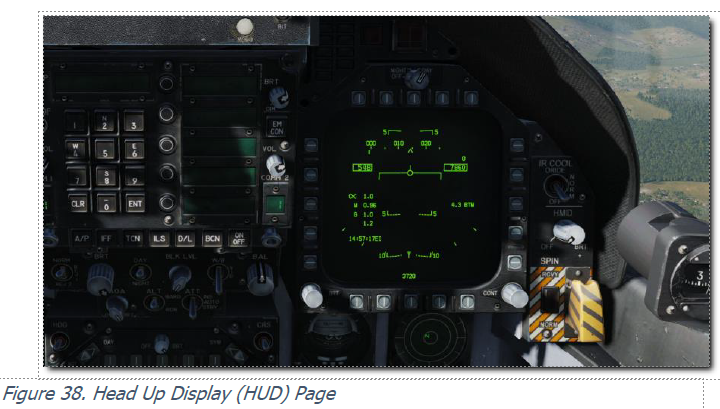
Head Up Display (HUD) Page. HUDページは、インストルメントパネル上部のHUDガラスに表示されている内容を複製します。HUDが故障したときや照明の影響で読めないときによく使われます。また、「ヘッドダウン」でHUDを簡単に確認できないときにも便利です。
Electronic Warfare (EW) Page. EWページでは、検出されたレーダーエミッターの表示、電子対策(ECM)の制御、チャフ、フレア、ECMデコイを含む消耗品対策の制御を組み合わせています
Air-to-Air RADAR
F/A-18Cの最も重要なセンサーは、おそらくAN/APG-73レーダーである。AN/APG-73はXバンド、全天候型、コヒーレント、マルチモード、マルチ波形のサーチアンドトラックセンサーで、プログラマブルデジタルプロセッサを使用しており、空対空タスクに大きな柔軟性を提供します。このアーリーアクセスガイドでは、まず複数のモードにまたがるRADARの側面について説明し、その後、独自のアプリケーションや兵器に特有のRADAR機能について説明します。
Basic Air-to-Air RADAR Information
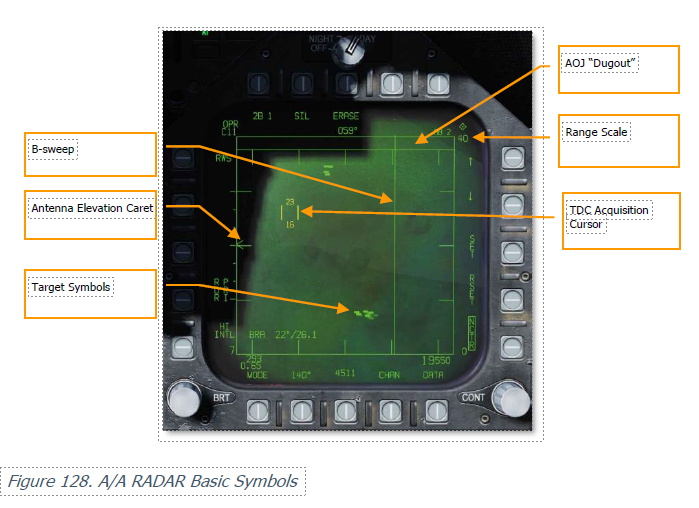
AN/APG-73は、パルスドップラー、ルックダウン/シュートダウンレーダーで、ビヨンドビジュアルレンジ(BVR)とクローズイン、エアコンバットマニューバリング(ACM)の両モードを搭載しています。今回のホーネットのアーリーアクセス版では、レンジ・ウィズ・サーチ(RWS)、シングル・ターゲット・トラック(STT)、そしていくつかのACMモードを搭載しています。空対空RADARディスプレイは、標準的なB-scopeフォーマットを使用しており、ディスプレイの下部中央に自機が配置されています。そのため、Bスコープ上の表示はすべて自機の前方に表示されます。スコープ上のターゲットは、一番近いものが下に、遠いものが上に向かって表示されます。自分の船の左右のコンタクトは、方位を示すためにディスプレイの中心の左右に表示されます。b-scopeの重要で基本的な構成要素は以下の通りです。
B-sweep. は、RADAR アンテナの瞬時の方位角位置を示すディスプレイ上の垂直スイープです。
Antenna Elevation Caret. アンテナ昇降キャレットシンボルは、垂直面内でのアンテナ昇降を示す。このシンボルは、自船の水平面を基準にしてピッチとロールが安定しています。サーチモードでは、シンボルはスロットルのRADAR昇降制御に反応します。
Range Scale. b-scopeの右側はRADAR範囲を表しています。目盛りには、選択したRADAR範囲のツシ、ツス、ツセのマークが表示されます。
TDC Acquisition Cursor. 2本の平行な垂直線からなるこのカーソルは、スロットルのスロットル指定制御(TDC)コマンドに反応して移動します。RADARサーチモードでは、RADARビームがカバーしている高度帯がカーソルの上と下に表示されます。ターゲットシンボルの上に配置されると、カーソルの左にコンタクトの対気速度が表示され、右に高度が表示されます。
Target Symbols. ターゲットシンボルは、実線の長方形(レンガ)で表示されます。目標シンボルの水平位置は、自艦の方位に対する角度位置を示している。垂直方向の位置は範囲を示しています。
AOJ “Dugout”. RADARの射程情報を否定している目標は、Angle On Jam(AOJ)の中のb-scopeの上部に配置されています。
Pushbuttons. RADAR ディスプレイの周囲には、RADAR モードとパラメータを制御するための 20 個のボタンが配置されています。ボタンを押すと機能が有効または無効になり、連続して押し下げると、その機能で利用可能なすべてのオプションが切り替わります。
A/A Waypoint and Bearing and Range
他の航空機の位置をよりよく把握するために、ブルズアイとも呼ばれる空対空ウェイポイント(A/Aウェイポイント)と、方位と範囲表示の両方をA/Aレーダー形式で表示することができます。これらは、AWACSや他のフライトからの位置情報を参照したり、チームメイトに有益なメッセージを送信することができるので、特に便利です。
A/A Waypoint
A/Aウェイポイントは、ウェイポイントデータベースのウェイポイントと一致します。A/Aウェイポイントが、ミッションでブルズアイが設定されている場所と同じ位置にあることを確認してください!
A/Aウェイポイントをウェイポイントに設定するには、HIS(Horizontal Situation Indicator Page)からDATAサブレベルを選択し、2を押してください。A/Aウェイポイントをウェイポイントに設定するには、HSIからDATAサブレベルを選択し、2ボタンを押してA/Aウェイポイントを現在のウェイポイントに設定します。
A/A ウェイポイントを設定した後、現在のウェイポイントを変更することができます。そのため、A/A ウェイポイントと現在のウェイポイントは異なる場合があります。
A/A ウェイポイントが作成されると、A/A レーダーフォーマット上では、円または菱形の矢印が磁北を指すように表示されます。A/Aウェイポイントと現在のウェイポイントが同じウェイポイントの場合、シンボルは菱形になります。ウェイポイントと現在のウェイポイントが異なる場合は、シンボルは円になります。.
Bearing and Range Indications
A/A ウェイポイントがベアリングと距離参照として使用できるようになりました。
A/AウェイポイントからTDC(Throttle Designator Controller)まで A/Aレーダーフォーマットのページの左上には、A/Aウェイポイントから現在のTDC位置までの方位と範囲が表示されています。
A/A Waypoint to Ownship. A/Aレーダーフォーマットのページの下部中央には、A/Aウェイポイントから現在地までの方位と距離が表示されます。
また、RWS / DATAサブレベルからBRAを有効にすると、自分からTDCまでの方位と距離をページの左下に表示することができます。
Range While Search (RWS) Mode
Range While Search (RWS) は、空対空時や空対空ミサイルが優先される場合のデフォルトのサーチモードです。RWSモードでは、全方位(ノーズオン、テールオン)と全高度(ルックアップ、ルックダウン)の目標検出が可能です。表示は縦軸に射程距離、横軸に方位角を表示します。 RWS モードでは、RADAR は最大 10 個のトラックファイルを維持することができます。
How to Use RADAR in Beyond Visual Range Mode
1.センサーパネルのRADARコントロールスイッチを操作する(OPR
2.マスターモードをA/Aまたはナビに切り替えます(A/AとA/Gは未選択)。
3.右のDDIのTACページからアタックレーダー(ATTK RDR)を選択します。
4.スロットルデジグネーターコントロール(TDC)を使用して、レーダーディスプレ
イのタクティカルエリア上のTDCカーソルをレーダーコンタクトの上に移動させます。
5.TDC を押し下げてターゲットをロックします。
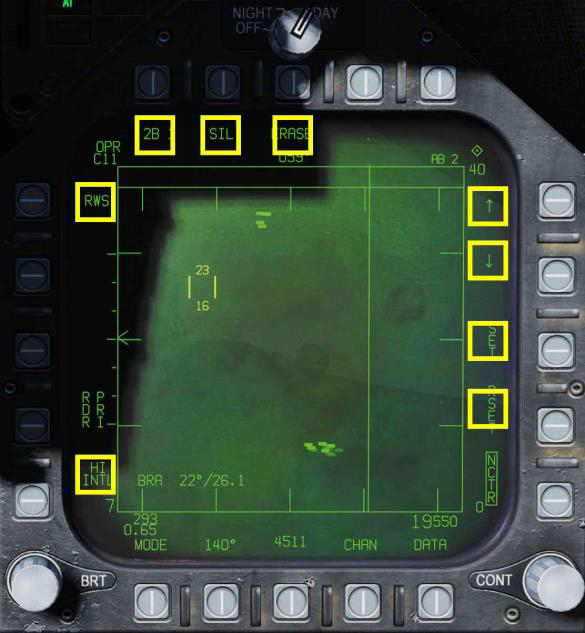
Information and functions of RWS mode consist of:
Range While Search (RWS)
1.Operational Mode. RADAR が動作して発光しているときは、OPR と表示されま
す。RADAR がスタンバイモードのときは、STBY と表示されます。
2.TDC Control Indication. RADAR ディスプレイを TDC 制御に選択すると、ディスプレイの右上にこのダイヤモンドマークが表示されます。TDC 制御用の RADAR の選択は、Sensor Control Switch を右に動かすことで行います。通常、RADAR は右の DDI に配置されていることに注意してください。
3.Elevation Bar Scan. RWS の場合、連続して押すと、1、2、4、6 の間でラスタースキャンが繰り返されます。バーの数が多いほど、スキャンされる標高のボリュームが大きくなります。しかし、バーの数が多いほど、完全なスキャン(フレーム)を完了するまでの時間が長くなります。バー間隔は通常 1.3 度ですが、5 nm スケールを選択した場合は 4.2 度になります。
4.Silent (SIL) Mode. SIL モードが選択されている場合(ボックス)、RADAR はスキャン動作を停止し、スタンバイ モードになります。これは、ディスプレイの左下に表示されているアイアンクロスでも示されています。SIL モードの場合、ディスプレイの左上隅にACTIVE オプションが表示されます(ターゲットの経年変化表示に置き換わります)。このオプションを押すと、現在のRADARの設定とプロパティに基づいて、RADARは1回の完全スキャン/フレームを実行します。スキャンが完了すると、自動的にSILモードに戻ります。
5.Erase. ERASE押しボタンを押すことで、検出されて再度表示されるまで、RADARディスプレイ上の全てのターゲット履歴が削除されます。また、サイレント(SIL)動作中の履歴も全て削除されます。これは、長いエイジタイムを選択している場合に便利です。
6.Heading. 自分の船の方位を度数で表示します。一般的には磁気方位ですが、真方位はHSI/DATA/A/Cサブレベルから選択できます。
7.Weapon and Number. 優先武器の名前と残量です。
8.Display Range. RADAR の表示範囲を選択します。5, 10, 20, 40, 80, 160 nm の設定が可能です。
9.Range Increment. このボタンを押すと、レーダーの表示範囲が広がります。最大範囲になると、インクリメント矢印は表示されなくなります。RADAR が STT モードの場合、矢印と機能は削除されます。
10.Range Decrement. このボタンを押すと、RADAR の表示範囲が減少します。最小範囲になると、インクリメント矢印は表示されなくなります。RADAR が STT モードの場合、矢印と機能は削除されます。
11.SET. SETボタンを押すと、武器のRADAR設定が優先的に保存されます。これには、表示範囲、仰角バースキャン、方位角、PRF、ターゲットエージングが含まれます。
12.RESET. 押すと、RADARの設定が優先的に武器の初期設定に戻ります。
13.Altitude. Ownship altitude.
14.DATA. この押しボタンを押すと、RADAR の表示が DATA サブレベルに切り替わります。
15.Azimuth Scan. RADAR は、20 度、40 度、60 度、80 度、140 度の方位角スキャン設定が可能です。この押しボタンを押すと、連続して押すことで設定が切り替わります。
16.Airspeed. IASとマッハでの自機対空速度。
17.PRF. パルス繰り返し周波数(PRF)は、中(MED)、高(HI)、およびINTL(インターリーブ)から選択できます。PRFを中に設定すると、「不感帯」を最小限に抑え、誤検出を減らし、全アスペクトの検出に優れていますが、検出範囲が狭くなります。High PRFは範囲は広いですが、低~中アスペクトの検出には劣ります。インターリーブされたバーカバレッジは、中と高を交互にカバーします。
18.Horizon Line. HUDの水平線のミラー。
19.Velocity Vector. HUDの速度ベクトルのミラーで、固定位置に表示され、自分の船の飛行経路のピッチとロールを示すために移動する水平線と一緒に使用されます。
20.RADAR Mode. 選択された RADAR モードを表示します。
21.Throttle Designator Control (TDC) Cursor. ページにTDCが割り当てられている場合は、TDCを使って上下にレーダー標高のボリュームを持つ2本の縦線をスリューすることができます。
22.Non-Cooperative Target Recognition (NCTR). 正しいパラメータが設定されている場合、STTロックされた航空機をタイプ別に識別することができます。STTセクションを参照してください。
Latent Track While Scan (LTWS) Mode
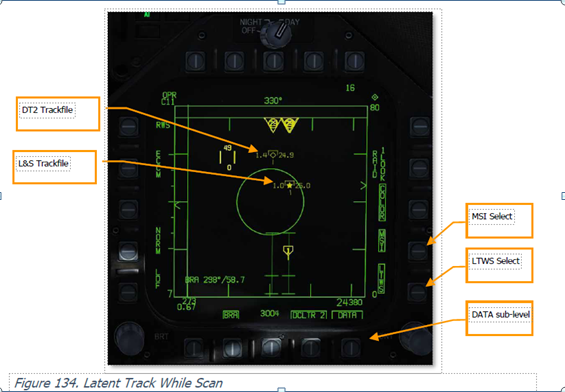
LTWS オプションは常に A/A データサブレベル表示に表示されます。LTWS オプションは初期状態ではボックスに入っており、LTWS が選択されていることを示しています。LTWS は、レーダーが RWS モードで動作している場合にのみ適用されます。RWS モードでは、HAFU シンボルはレーダーアタック表示に表示されません。LTWSでのみ、レーダーがMSIトラックファイルをサポートしています(レーダーのみMSIトラックファイル)。レーダーオンリーのトラックファイルの表示は、レーダーのローヒット(ブリック)または捕捉ポイントキューのみです。
LTWS オプションを選択すると、捕捉カーソルの下にあるレーダーのみのトラックファイルに HAFUシンボルを表示することができます。取得カーソルの下にあるトラックファイルが上位8つの優先トラックファイルの1つである場合、その発射ゾーンが表示されます。さらに、トラックファイルのマッハと高度が HAFU の左右に表示されます。
LTWSでHAFUを指定すると、そのトラックファイルは打ち上げと操舵(L&S)ターゲットとして設定され、星型のHAFUで表示されます。一度指定されると、2 つ目のトラックファイルを指定することができ、これはダイヤモンド HAFU を含む Designated Target 2 (DT2) になります。このようにして、2つのトラックファイルを追跡することができ、3つ目のトラックファイルにTDCカーソルを置くことで3つ目のトラックファイルを追跡することができます。
ただし、LTWSモードでは武器は使用できません。武器を使用するには、レーダーがSTTまたはTWSモードになっている必要があります。
箱入りの LTWS オプションを押すと LTWS の選択が解除され、LTWS オプションが表示されます。LTWS が選択されていない場合、取得カーソルが置かれたときに隠されたレーダーのみの MSIトラックファイル HAFU シンボルは表示されません。
L&S と DT2 の両方が作成されると、HUD 上では 2 つの別々のインジケータとして表示されます。L&S はボックスとして表示され、DT2 トラックファイルは「X」として表示されます。
Multi-Sensor Integration (MSI)
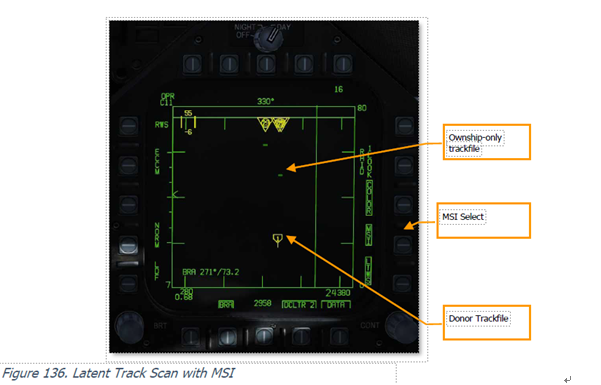
LTWSモードのオプションコンポーネントとしてMSIがあり、これは押しボタン14から有効にすることができる。有効化(ボックス表示)されると、TDCカーソルがLTWSトラックファイルの上にない場合でも、ドナー情報がHAFUとして表示される。これにより、AAレーダーフォーマットページのSA(Situational Awareness)表示と同様の表示が可能となり、前方の空域をより完全に把握することができる。ただし、これには前方と左右と後方のデータリンクドナー情報のみが含まれています。
自機センサーのみで検出されたトラックファイル(ドナー貢献なし)は、標準的なRWSヒット(ブリック)として表示されます。
なお、RWS用のMSIはLTWSモードが有効な場合にのみ表示されます。
Single Target Track (STT) Mode
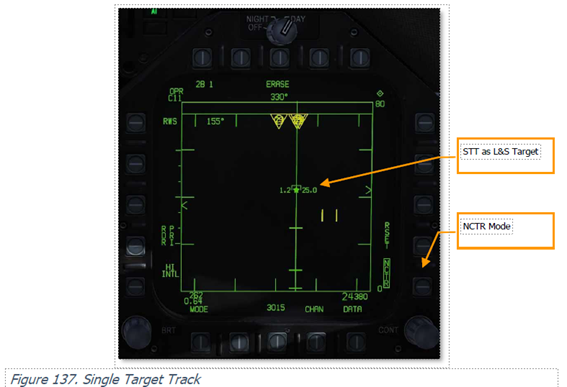
手動または自動でのターゲット取得完了時にSTTが入力されます。
•RWSのヒットにTDCカーソルが重なっている時にTDC指定ボタンを押す。
•LTWSトラックファイルにTDCカーソルが重なっている時にTDC指定ボタンを2回押す。
•AACQモードまたはACMモードを使用している場合。
STTはレーダーの攻撃表示で表示されます。レーダーは追跡された目標の範囲と角度を継続的に監視しています。このデータは、ミサイルや砲の攻撃を計算するために使用されます。攻撃表示は、計算されたデータに基づいて、迎撃コースと発射/発射包絡線を提供します。航法機マスターモードでは、ACM モードと STT 発射エンベロープは使用できません。HOJモードやFLOODモードでない限り、発射にはSTT軌道が必要である。
自動レンジスケール調整はSTTトラックの機能である。自動レンジスケール調整は、レーダーがSTTで動作しているとき、またはRSET押しボタンスイッチが押されているときに有効になります。L&S、DT2、STTターゲットが有効射程距離を持ち、戦術エリア内にある場合は、レンジスケール制御ターゲットとして使用されます。デジタルデータコンピュータが自動的にレンジスケールを調整し、最も遠いレンジスケール制御目標が選択されたレンジスケールの40%から90%の間で表示されるようにします。表示が範囲分解されたL&Sターゲットについて拡大されるとき、デジタルデータコンピュータは動的には、L&Sターゲットレンジを中心に、表示レンジリミットが5nmiのレンジになるようにレンジスケールを調整します。自動レンジスケール制御は、STT のレンジスケールをインクリメント、デクリメントしますが、TWS のレンジスケールはインクリメントのみとなります。レンジスケールを手動で調整している場合は、RSET 押しボタンスイッチを押すまで自動レンジスケール制御は無効になります。STTモードでは、レーダーは1つの接点にのみ焦点を合わせ、他の接点は表示されないことを理解しておくことが重要です。
Non-Cooperative Target Recognition (NCTR) Mode
接点をSTT L&Sターゲットとして追尾した場合、NCTR機能により、一定のパラメータの下で機体の種類を識別することができます。NCTR 機能は、RWS フォーマットページの押しボタン 15 から選択できます。
NCTRは、エンジンのファンブレードが異なる特性を持ち、それを航空機の種類に相関させることができるという原理に基づいて動作する。これは、ターゲットのSTTトラックと
– 目標は25nm以内
– ノーズオンまたはテールオンで30度以内。
識別結果は、ターゲットにTDCカーソルを合わせるとSAページに表示されます。その後、ページ右下のデータブロックにタイプが表示されます。
NCTRは、二要素のターゲット識別のための重要な機能となり得る。
コントロールスティック
コントロールスティックでは、センサーコントロールスイッチと指定外ボタンが重要です。ビヨンド・ビジュアル・レンジ(BVR)モードのときに、センサーコントロールスイッチを右に押すと、右のDDIのときにTDC制御がRADARに設定されます。ディスプレイにTDCが割り当てられている場合は、ディスプレイの右上に中央にドットの入ったダイヤモンドが表示されます。
TDC が既にアサインされている状態でセンサー コントロール スイッチを右に押すと、RADAR は自動取得 (AACQ) モードになります。AACQ が指令されたときに TDC がターゲット シンボルの上にある場合は、そのターゲットにロックオンするように RADAR に指示されます。取得シンボルの下にターゲット シンボルがない状態で AACQ を押すと、RADAR は選択された RADAR スキャンボリューム内で最も近いターゲットにロックオンしようとします。
Sensor Control Switch. この四方切替スイッチには、一般的に2つのモードがあります。空対空
モードの場合。ビヨンド・ビジュアル・レンジ(BVR)モードの場合、以下のように機能します。
•Forward: ボアサイトがデフォルトで選択されている状態で、航空戦闘操法(ACM)モードに切り替えます。
•Aft: Assigned TDC to center, MPCD
•Left: Assigns TDC to left DDI•Right: TDC を右の DDI にアサインするか、または TDC が既に右の DDI にアサインされている場合は、自動取得モードで RADAR に入ります。
ACM モードの場合、センサーコントロールスイッチは以下のように動作します。
•Forward: レーダーボアサイト(BST)モード•Aft: レーダー垂直捕捉(VACQ)モード
•Left: RADAR Wide Angle Acquisition (WACQ) モード
Weapon Select Switch. これは5段階のスイッチで、選択した空対空兵器を素早く優先的に設定することができます。その際には、武器を最適に使用するために、RADARもデフォルト設定に設定されます。
•Forward: AIM-7 Sparrow
•Press Down: AIM-9 Sidewinder
•Aft: M61A2 20mm Gun
•Right: AIM-120 AMRAAM
•Left: No Function
Trigger. 砲や空対空ミサイルのように前方に向けて発射する。Undesignated Button. 空対空モードの場合、Undesignate ボタンの主な機能は、RADAR で指定されたターゲットのロックを解除することです。また、RADAR ACM モード時には、RADAR サーチモードに戻るためにも使用できます。Throttle 今回のアーリーアクセス版では、最も重要なRADARコントロールは、Throttle Designator Controller (TDC)とRADAR elevation Controlの2つです。RADAR elevation controlはホイールで、これを後ろに回すとRADARのスキャンが上昇して前方に回転させると、エレベーションスキャンが下がります。
TTDC は、プレスボタン機能を持つカーソルコントロールです。右側DDIのRADARに割り当てられている場合、RADARの戦術表示エリア内のTDC取得カーソルを制御します。空対空RADARディスプレイでは、TDCカーソルの上下の数字は、ディスプレイ上のTDCの範囲におけるRADARの最大および最小の高度カバー率を示しています。TDCをディスプレイの境界線上に移動させると、RADARのモードやパラメータの変更に使用することができます。TDCが境界を越えてモード選択エリアに移動した場合、モードオプションがディスプレイに表示されます。希望のモードにカーソルを合わせて TDC を押すと、選択したモードに最適なパラメータが RADAR に表示されます。また、ディスプレイの周囲に表示されている他のパラメータも制御することができます。
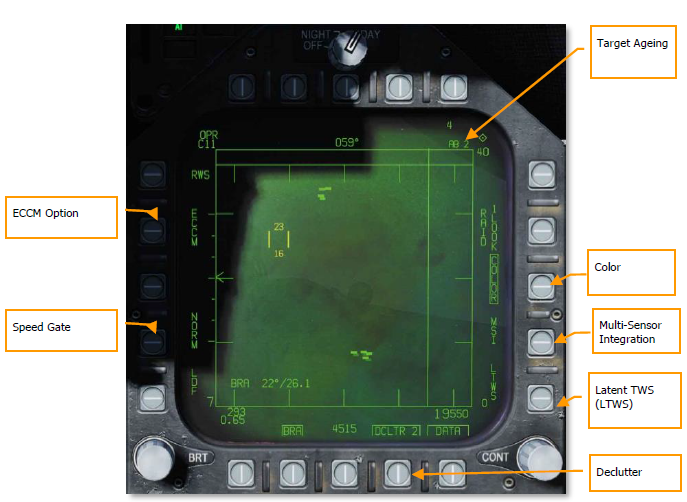
Target Ageing. レーダーの接触が失われた後、ターゲットシンボルがディスプレイ上に残る時間は、2、4、8、16、32秒の間で連続して押すことで調整できます。
SILモードが選択されている場合、このフィールドはACTIVE表示に置き換わります。COLOR. ディスプレイをモノクロで表示するか、3 色の色を限定的に使用するかを選択します。TDC カーソルを黄色で表示することに加えて、LTWS および TWS モードのトラックファイルを黄色と赤で表示することができます。Latent Track While Scan (LTWS).LTWSは、RWSモード中にトラック・ウィズ・スキャン(TWS)機能を提供します。
LTWSを有効にすると、ターゲットシンボルの上にTDCを置くと、L&S(Launch and Steer)トラックシンボルが表示されます。ただし、”Shoot “キューは表示されません。LTWS ターゲットの対気速度はマッハ単位で左に、高度は数千フィート単位で右に表示されます。さらに、その射程距離と閉鎖情報は、右の戦術的な境界線に沿って表示されます。Multi-Sensor Integration (MSI). マルチセンサー統合(MSI)。
有効にすると、データリンク情報をLTWSとTWSモードに統合することができます。
DATA.サブレベルを終了します。Declutter.RADAR 表示のデクラッタを 2 段階で選択できます。DCLTR1 は、水平線と速度ベクトルを削除します。
DCLTR2 は、STT モードの場合、DCLTR1 のすべての項目に加えて、ターゲット差動高度、ターゲットヘディング、レンジレート数値、レンジキャレットを削除します。選択されたモードは、DCLTR1 または DCLTR2 と表示されます。Speed Gate. ドップラー放射状速度ノッチの幅を決定するために、ノーマル(NORM)とワイドターゲットの速度ゲートを選択します。これは、自動車や一般的な航空機のような遅い動きのターゲットを検出しない/フィルタリングするために使用されます。WIDEモードでは、ノッチフィルタが増加し、遅いターゲットが検出され表示されます。(オープンベータ版では後日公開予定) ECCM. 電子的なカウンター対策を有効または無効にします。
有効にすると、敵機の妨害効果は顕著ではないが、RADARの感度は低下する。(オープンベータ版では後に予定) Air Combat Maneuvering (ACM) Modes ACMレーダーモードは、自動捕捉を念頭に置いた接近戦用に設計されています。
ACMモードは、空対空BVRモード中にセンサーコントロールスイッチを前方に押すか、ウェポンセレクトスイッチを後方に押してA/A GUNを優先的に設定することで選択することができます。ガンズアクイジションモード以外は、どの空対空ミサイルでも全てのACMモードに対応しています。How to Use RADAR in Air Combat Maneuvering (ACM)
Mode
1.センサーパネルのRADARコントロールスイッチを操作する(OPR2.マスターモードスイッチをA/Aに切り替えます。3.右のDDIのTACページからアタックレーダー(ATTK RDR)を選択します。4.センサーコントロールスイッチを正方向に押すとACMモードになります。5.ウェポンセレクトスイッチの船尾を押して、A/Aガンをプライオリティに設定し、レーダーをガンオートアクイジション(GACQ)モードにします。6.ACM モードに入ったら、センサーコントロールスイッチを使用して ACM モードを選択します:ボアサイト(BST)は前方、垂直(VACQ)は後方、広角(WACQ)は左側。
There are four ACM modes:
•Gun Acquisition (GACQ) モードは、Air to Airガンが選択されている場合に自動的に有効になります。このモードは、HUD上の20度の破線の円で表現され、HUDの視野全体を網羅しています。他のACMモードとは異なり、GACQは銃にのみ使用できる。GACQは5マイル先までのターゲットを検索します。
•Boresight (BST) センサーコントロールスイッチを前方に押して、ボアサイト(BST)を選択します。選択すると、破線の3.3度の円がHUDに表示されます。この円は、RADAR の自動取得サーチ ゾーンを示します。BST は、10 マイル先のターゲットを検索します。
•Vertical Acquisition (VACQ) モードは、Sensor Control Switch の aft を押して選択します。そうすると、HUDに2本の破線の垂直線が表示されます。この垂直自動サーチパターンは、-13度から+46度までの範囲をカバーしています。VACQは、5マイル先までサーチします。
DCS Users Manual DCS F18C HONET 動画マニュアル
DCS F/A-18C HORNET Early Access Guide(2) DCS F/A-18C HORNET Early Access Guide(3)
DCS F/A-18C HORNET Early Access Guide(4) DCS F/A-18C HORNET Early Access Guide(5)
DCS F/A-18C HORNET Early Access Guide(6) DCS F/A-18C HORNET Early Access Guide(7)
VC++ MFCに印刷機構を組み込む手順の解説 リストコントロ-ルのセル選択を実装(3)