Correlated Onboard Sensor and Offboard F/F and SURV Tracks
オンボードセンサーとオフボードセンサーの両方で検出された接点は、HAFU 記号の上側と下側の両方の要素が表示されます。これは相関コンタクトと呼ばれます。コンタクトの色は搭載センサーの識別情報に基づいており、友好的と判断されない限り脅威ランクが含まれます。
なお、オンボード識別とオフボード識別が異なる場合は、HAFUを混在させることができる。これは曖昧な接触と呼ばれる。例えば、レーダー上に IFF の識別がないコンタクトがある場合、HAFU は不明となる。しかし、オフボードドナー(F/F または SURV)がそのコンタクトを敵対的と分類した場合、HAFU は上部が長方形で下部が三角形になる。このように、HAFUの組み合わせは様々な可能性があります。




Offboard Surveillance (SURV) SA Symbols
その他の HAFU タイプは、監視(SURV)アセットによってのみ検出されるコンタクトである。このコンタクトは、AWACS からは見えるが、自分からは見えない。レーダーを使用しない場合に有効です。
コンタクトは友好的(緑の丸)または敵対的(赤い菱形)で、ベクトルステムが表示されます。これらのシンボルは他のHAFUの3/4の大きさです。


- 航空機の場合は、進行方向を示すステムも表示される。
- SURV軌道がF/F軌道と相関がある場合、F/F軌道記号が表示される。
- SURV軌道がオンボードセンサーのみの軌道と相関がある場合、オンボードおよびオフボードトラッキングを示すF/Fシンボルが表示されます。
- SURVシンボルは、PPLI、F/F、またはオンボードセンサーと相関がない場合にのみ表示されます。
- コンタクトで SURV トラッキングが失われた場合、シンボルは 3 ヘルツで 6 秒間点滅します。追跡が再確立されない場合、その契約は SA ページから削除されます。
ターゲットシンボルのランク付け
各トラックファイルHAFUは、自軍センサーに追跡されている場合、1~16のランク付けが行われる。潜在的な脅威が大きいほど、ランクの数値は低くなります。ランクに影響する要素は以下の通り。 - 範囲
- アスペクト
- 対気速度
Target Under Cursor (TUC) Data
TDCカーソルをSAページ上のシンボルに合わせると、右下にそのシンボルに関する情報が表示されます(下図)。
友好的な場合。
- 航空機の種類。例えば F15
- ユニットのコールサイン(名前と番号の最初の文字と最後の文字)/燃料の残量
- ユニットの方位とプレイヤー機との距離


敵対する場合。
- 航空機の種類 例えば SU27。NCTRプリント
- 単位対地速度・方位
- ユニットの方位とプレイヤー機との距離

f 不明です。
- 不明(UKN)の識別
- 単位対地速度・方位
- ユニットの方位とプレイヤー機との距離

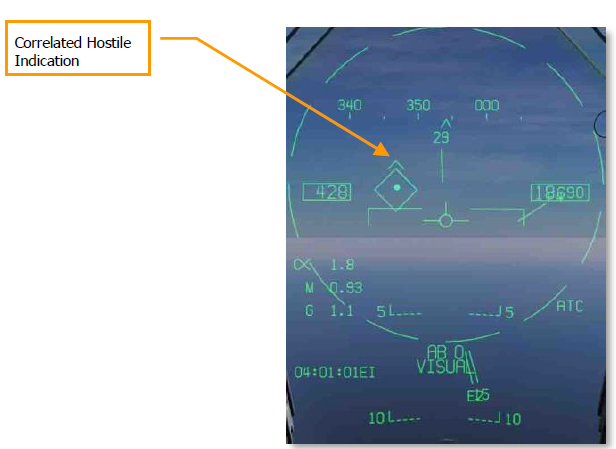
Correlated HUD Indication
機体がSTTにロックされ、データリンクが有効になっているとき、機外の情報源からターゲットを確認することができれば、HAFUの「帽子」がTDダイヤモンドの上に描かれる。
Latent Track While Scan (LTWS) Mode
RWS モードでは、攻撃レーダーフォーマットの DATA サブレベルで LTWS オプションが使用できます。初期状態では、LTWS オプションはボックスで囲まれており、LTWS が選択されていることを示しています。LTWS は、レーダーが RWS モードのときのみ有効です。
LTWS が無効な場合 (ボックスがない場合)、レーダーには HAFU の記号は表示されず、レーダーリターンを表すレンガが表示されるだけです。LTWSをボックス化すると、レーダーがサポートするMSIトラックファイルのHAFUシンボルだけが表示されます。言い換えると、他の航空機からのドナーHAFUは表示されず、レーダーリターンに相関するHAFUだけが表示されます。
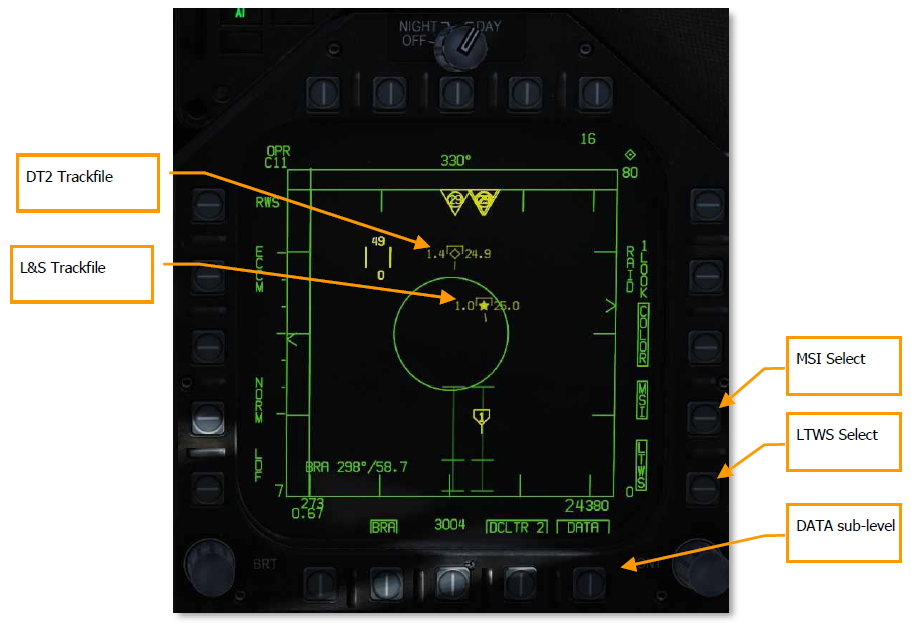
LTWS がボックス化されている場合、パイロットはアクイジションカーソルの下にある HAFU トラックファイ ルを指定することができます。トラックファイルを指定すると、TWS モードと同様に HAFU の左右に速度(マッハ)と高度が表示され ます。また、指定したトラックファイルが8つの優先トラックファイルのうちの1つである場合は、その発射区域も表示されます。
LTWSトラックファイルを指定すると、L&S目標に設定されます(HAFUに星印が表示されます)。L&Sが設定された後、2つ目のトラックファイルを指定すると、そのトラックファイルはDT2(HAFUに菱形で表示)になります。このようにして、2つのトラックファイルを追跡することができ、アクイジションカーソルをそのHAFUシンボルに合わせることによって、3つ目のトラックファイルを追跡することもできます。
ただし、LTWSモードでは武器は使用できません。武器を使用するには、レーダーがSTTまたはTWSモードである必要があります。
LTWSを解除すると、アクイジションカーソルをレーダーターゲットに合わせた場合でも、HAFUマークが表示されなくなる。
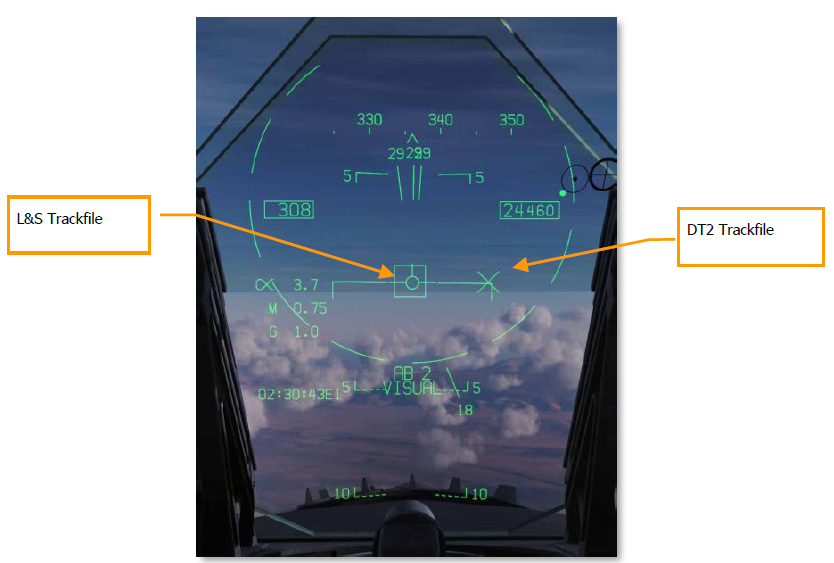
L&SとDT2の両方が作成されると、HUD上に2つの別々のインジケータとして表示されます。L&Sはボックスとして表示され、DT2トラックファイルは「X」として表示されます。
Multi-Sensor Integration (MSI)
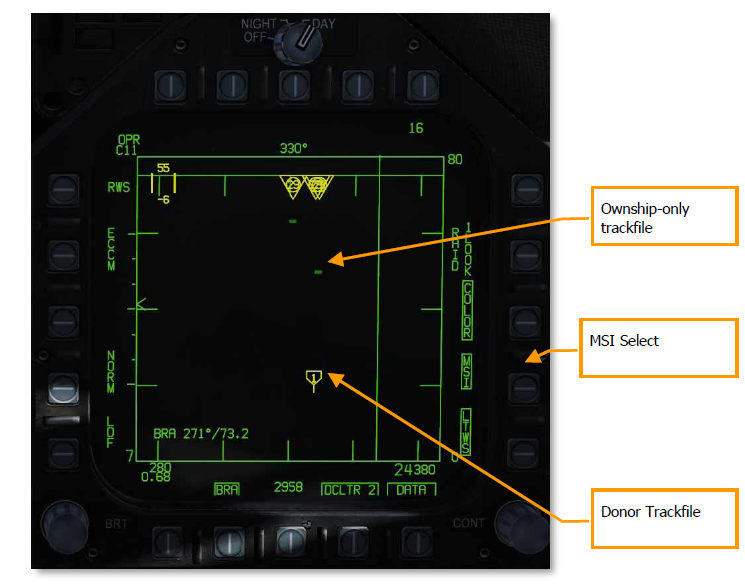
LTWSモードが有効な場合、パイロットはさらにPB14を使用してマルチセンサーインテグレーション(MSI)を有効にすることができます。MSI がボックス化されると、TDC が LTWS トラックファイル上にない場合でも、ドナーターゲットが HAFU として表示されます。これにより、レーダー表示がSAフォーマットと同様になり、パイロットはより完全なAir-to-Air Pictureを得ることができます。
オンボードセンサーのみで検出されたトラックファイル(寄与するドナー航空機なし)は、標準的なRWSブリックとして表示されます。
RWS用MSIは、LTWSモードが有効な場合にのみ表示されることに注意してください。
AZ/EL Format
AZ/EL(Azimuth Over Elevation)形式は、レーダーやその他のセンサーで探知したターゲットを前方から見た状態で表示するものです。通常の攻撃レーダーは上から下へのBスコープ表示ですが、AZ/ELフォーマットはボアサイト表示で、”機首からの眺め “を表示します。AZ/ELページでは、マルチセンサーインテグレーション(MSI)プラットフォームからのHAFUシンボルとレーダーまたはFLIRのいずれかで検出されたリターンが組み合わされて表示されます。
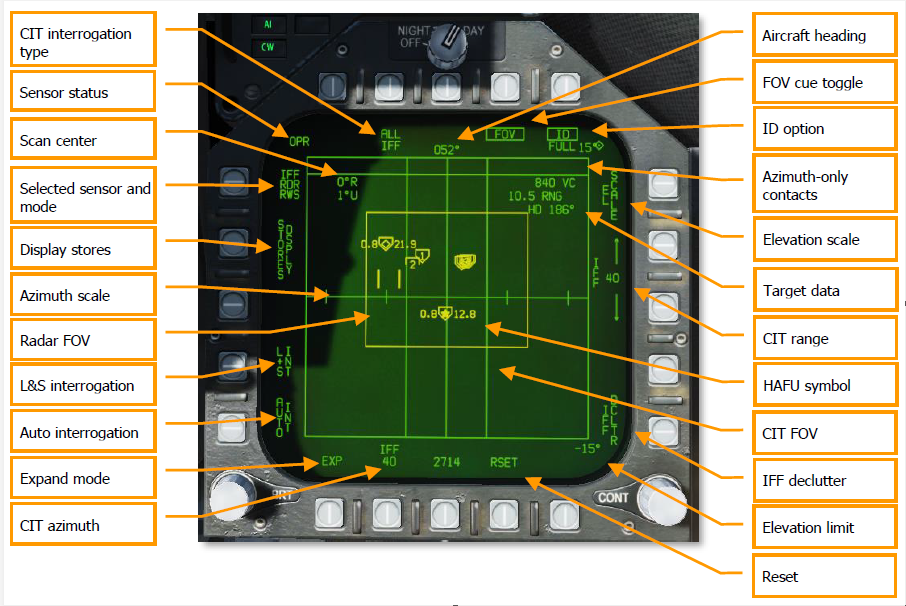
選択されたセンサーとモード。このプッシュボタンを押すと、アクティブなセンサーとしてレーダーとFLIRが切り替わります。どちらの場合でも、MSIトラックはセンサーリターンと共に表示されます。
センサーモードはRDRまたはFLIRで表示され、その下にセンサーのサブモード(RDRはRWS、TWSまたはVS、FLIRはPNTまたはTRACK)が表示されます。
センサーの状態。選択したセンサーのステータスを表示します。RDRの場合:OFF、STBY(待機)、OPER(動作)、SIL(静音)、DEGD(BITまたはMUX故障)、EMCON(中断)、TEST(自己診断)。FLIRの場合:OFF、STBY、OPER、DEGD、TESTのいずれか。
標高スケール。70°×±5°、±70°×±15°、±70°×±30°、±70°×±70°のスキャンボリュームを周期的に表示します。
エレベーションリミット:ポジティブおよびネガティブエレベーションリミットを表示し、PB11 (EL SCALE)で選択可能です。右上にプラス、右下にマイナスのリミットが表示されます。
レーダー視野 レーダースキャン範囲の水平方向と垂直方向を表示します。このボックスは、FLIR がアクティブなセンサーである場合に淡色表示されます。
FOV キュー トグル。レーダーとFLIRのFOVキューのオン/オフを切り替えます。
エクスパンドモード。以下の拡張モードを参照してください。
スキャンセンター。スキャン中心点の方位角と仰角を表示します。スキャンセンターを変更するには、以下の「レーダースキャン中心点の変更」を参照してください。
HAFUシンボル。MSIトラックはHAFUシンボルとして表示されます(上記のHAFUシンボルを参照)。L&SおよびDT2ターゲット情報は、AttackおよびSAフォーマットと同じです。
ターゲットデータ。L&S、または現在カーソルの下にあるトラックのデータ。接近速度、目標までの距離、目標方位が含まれる。
リセット。拡張モードを終了し、MSI トラックファイルを再優先します (Attack Radar フォーマットと同じ機能)。
方位のみのコンタクト 標高データのないコンタクトは、ここで “ダグアウト” に表示されます。
ID オプション。HAFU データブロックに表示されるデータの種類を決定します。FULL(レーダーと MSI データ)、RDR(レーダーデータのみ)、unboxed(データブロッ ク非表示)のいずれかに切り替えます。本機能およびHAFUデータブロックは未実装です。
CIT interrogation type: CIT(combined interrogator/transponder)により開始される自動問い合わせの種類を変更します。オプションは、ALL(すべてのIFFモード)、SNGL(選択したIFFモード)、CC(正しいコード、SNGLのようだが特定のSIFコードが必要)です。未実装。
CITアジマス。手動および自動の CIT 尋問の水平範囲を変更します。20°、40°、80°、140°の間で循環する。未実装。
CIT FOV。CITによる手動および自動問い合わせの方位角範囲を示す。未実装。
CIT 範囲。CITの手動(自動ではない)問い合わせの最大範囲を示し、この範囲を超えるリターンは表示されない。上下の矢印で範囲を変更します。オプションは、5, 10, 20, 40, 80, 100 NM。未実装。
オートインタロゲーション(Auto interrogation)。ボックスに入れると、新しいL&Sが指定されたとき、L&Sがステップされたとき、またはHACQ/LACQが試みられたときに、自動的にシングルポイントCIT問合せを実行する。未実装。
L&S問い合わせ。ボックス化されている場合、L&Sが指定されるたびに、自動的にL&Sの連続ポイントCIT問い合わせを実行する。未実装です。
IFF declutter。ボックス化すると、新しいCITトラックの表示を抑制し、既存のトラックのエージングを可能にします。未実装。
店舗を表示する。押すと、STORESページを表示します。