IIHADSSのボアサイト
スタートアップ時には、各クルーのヘルメットの正確な方位と仰角の位置データを航空機システムに提供するために、各クルーステーションのIHADSSのボアサイトが必要である。この作業はWeapon(WPN)ページのBORESIGHTサブページで行う。
BORESIGHT ページに入った後、IHADSS (L4) を選択して、前方コックピットパネルのボアサイトレティクルユニット (BRU) を起動し、IHADSS をボアサイトモードに切り換えます。BRUのブルズアイパターンは、左コンソールにあるINTR LTパネルのPRIMARY照明ノブを上げると点灯する。
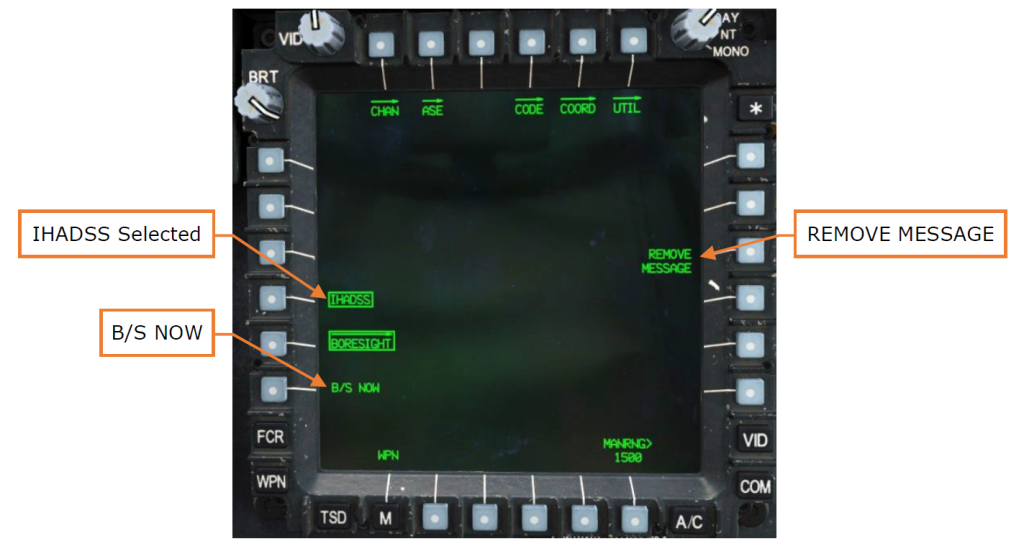
自然な姿勢で頭を置き、HDUのLOSレティクルをBRUの照明されたブルズアイパターンの中心に向けます。HDUがブルズアイ内に位置したら、ベゼルボタンまたはMPDカーソルを使ってB/S NOW (L6)ボタンを押します。ボアサイト位置が承認されると、BRU のブルズアイパターンが消え、B/S NOW オプションが MPD ページから削除され、IHADSS (L4) ボタンがボックスから外れる。

IHADSS ボアサイト処理を中止するには、IHADSS (L4) を選択し直すだけで B/S NOW オプションが削除され、IHADSS (L4) ボタンが非表示になります。IHADSS をボアサイトせずに、High Action Display の Sight Status フィールドから “IHADSS B/S REQUIRED” のメッセージを削除するには、REMOVE MESSAGE (R3) を押してください。
エンジン始動前
エンジンを始動する前に、以下のことを行ってください。
- (PLT/CPG) NVSモード切替 – 必要に応じて。
- (PLT)待機姿勢表示器 – ケージを外す。
エンジン始動 - (PLT) ヘリコプターの周辺を清掃すること。
ローターロックエンジンの始動は、始動するエンジンの排気の上にローターブレードが直接ある状態で行ってはならない。 - (PLT) RTR BRK スイッチ – OFF、またはローターロック始動の場合は LOCK。
- (PLT) EXT LT – ANTI-COL – 昼はWHT、夜はRED。
始動中、アイドル回転数が63%になる前にTGTが851℃を超えそうな場合、電源レバーをアイドル状態にしてから45秒以内にTGT、NP、ENG OIL PSIが上昇しない場合、またはNG52%になる前にENG 1または2の始動勧告が解除された場合、電源レバーをOFFにし始動を中断してください。
エンジン始動中は、ENGとENG SYSのページを選択し、航空機の表示をモニターしながら、次のことを行ってください。
- (PLT)第1エンジン-以下のように始動する。
o ENG STARTスイッチ-START、EUFDのENG#STARTアドバイザリ、ENGページに表示されるSTARTボックスを確認する。
パワーレバーをIDLEに進める前に、TGTが80°C以下であるこ とを確認する。
o パワーレバー-IDLE、Ngの上昇を最初に確認する。
o ENG OIL PSI – モニター。
o TGT – 監視する。
o NG – 監視する。
o MSTR WARN, MSTR CAUT, および EUFD – モニタ。 - (PLT) 第 2 エンジン – 上記ステップを繰返す。
- (PLT) RTR BRKスイッチ-OFF。
パワーレバーをFLYにする前に、ENG 1と2両方のオイルPSI表示が70 PSI未満で、NGB温度表示が20° C以上であることを確認する。 - (PLT) POWER レバー – POWER レバーを両方ともスムーズに FLY に進め、両方のトルク表示が同時に増加することを確認します。
- (PLT) NP と NR – 101% を確認します。
- PLT)MSTR WARN、MSTR CAUT、EUFD-モニターしてください。
- (PLT) APU – オフ。
タキシング前
地上滑走を開始する前に、以下のことを行ってください。 - (PLT) EXT LT パネル – ナビライトが BRT になっていることを確認し、ANTI-COL を昼は WHT、夜は RED に設定する。
- (PLT/CPG) サーチライト・・・必要な時に。
- (PLT) パーキングブレーキ-解除、ハンドルを入れる。
- PLT) TAIL WHEEL ボタン- 必要に応じてロックを解除し、 ロックが解除されたことを確認し、ライトを点灯させる。
タクシーと離陸
地上でのタキシング
ATC にタキシングの許可を得た後、トランジションシンボルを選択する。フォーストリムリリースを押したまま中断する。航空機の総重量や路面状況に応じて、コレクティブを27%〓30%TQに上げる。加速度キューがLOSレティクルの先端に来るまでフォワードサイクリックを適用し、フォーストリムスイッチを解除します。必要に応じてコレクティブを追加し、動作を開始させます。必要に応じてフォーストリムを中断し、フォア/アフタサイクリックで加速度キューをLOSレティクルの先端に維持する。対地速度5〓6ノット程度、または路面状況に応じた速度を維持する。地上速度はウェイポイントステータスウィンドウで確認することもできます。
旋回を開始する前に、TAIL WHEEL UNLOCKED 押しボタンライトが点灯していることを確認します。ペダルを曲がる方向に踏み込み、ペダルの踏力/反力によって一定の旋回速度を維持します。水平線を維持するために、旋回方向にサイクリックをかける。
ヘリコプターを停止させるには、まずロックしてTAIL WHEEL UNLOCKED押しボタンライトが点灯していないことを確認し、アフトサイクリックをかけ、加速キューをLOSの中央に合わせます。ホバーシグナルを選択すると、より正確に前後方向のドリフトを判断することができます。トリムボールを基準にして、左右のサイクリックでトリムボールの中心を維持する。機体が停止したら、飛行制御をニュートラルにし、コレクティブを下げる。
地上でのタキシングでは、次のことを行って下さい。
- PLT/CPG) ホイールブレーキ – 両クルーステーションで、つま先ブレーキに少し圧力をかけて確認する。
- (PLT) ENGページ-チェック、NP/NR 101%、全ての表示が緑。
- PLT)FLTページ-チェックと高度計の設定/更新を行う。
- (PLT) パイロットスタンバイ計器-確認と高度計の設定/更新を行います。
離陸前
ホバリングに入る前に、以下のことを行ってください。 - (PLT/CPG) 武器サブシステム-以下を確認する。
o A/S ボタン-SAFE。
o GND ORIDE ボタン-オフ。
o 武器が作動していない-ハイ・アクション・ディスプレイ(HAD)で確認する。 - PLT/CPG) TAIL WHEEL ボタン-ロック、UNLOCKED ランプが消灯している。
- (PLT) パークブレーキ-解除、ハンドルを入れる、または任意で。
- (PLT/CPG) システム – 以下のように確認します。
o FUEL ページオプション – 確認してください。
XFER – AUTO.
XFER – AUTO ・XFEED – NORMAL ・BOOST – OFF
BOOST – OFF。
CHECKページ – ページを選択し、15分間の燃料チェックを開始します。
CHECK ページ – 選択を解除します。
o Fuel quantity – フライトするミッションに必要な燃料をチェックし確認する。
o EUFD – 警告と注意事項を確認する。
o Engine and flight instruments – 確認。
NP/NR 101%、全表示が緑であること。
高度計はFLTページとパイロットの待機高度計の必要に応じて更新する。
o ASE – 必要に応じて。
o Avionics – 必要に応じて。
トランスポンダー-正常、または必要に応じて、適切なコードを鳴らす。
〓 COMM – 必要に応じて、EUFDで確認する。
NAV – 航海指示の更新、または希望する航路の選択。
ホバーパワーチェックを行う前に、ENGページとPERFページが表示されていることを確認する。
o Hover Power Check – 実行する。
ホバリングフライト
Before Takeoff Checkが終わり、フライトコントロールがニュートラルになっている状態で、機体が軽くなるまでフォーストリムを押し続け(PERFページのIGEホバーパワーより約20%下)、その後リリースし、ヘディングホールドがかかるようにします。サイクリックで加速度キューを視線レティクル中央で維持し、サイクリックの圧力/反圧力で位置を維持し、ペダルの圧力/反圧力で機体のヘディング維持の補助を行う。機体が5フィートのホバリングに達したら、必要に応じてフォーストリムを中断し、必要に応じてホールドモードを作動させる。
その日最初のホバリングであれば、機体のコントロールレスポンスとCGが正常であることを確認し、Hover Power Checkを行う。
ホバーパワーチェック
図205. Hover Power Check PERFページ
PERF ページを参照し、HOVER Q INDICATED 値が REQUIRED IGE 値と一致することを確認します。次に、表示された値がGO-NO/GO OGE値より小さいかどうかを確認します。INDICATED値がGO-NO/GO OGE値より大きい場合、航空機に十分な燃料がない。
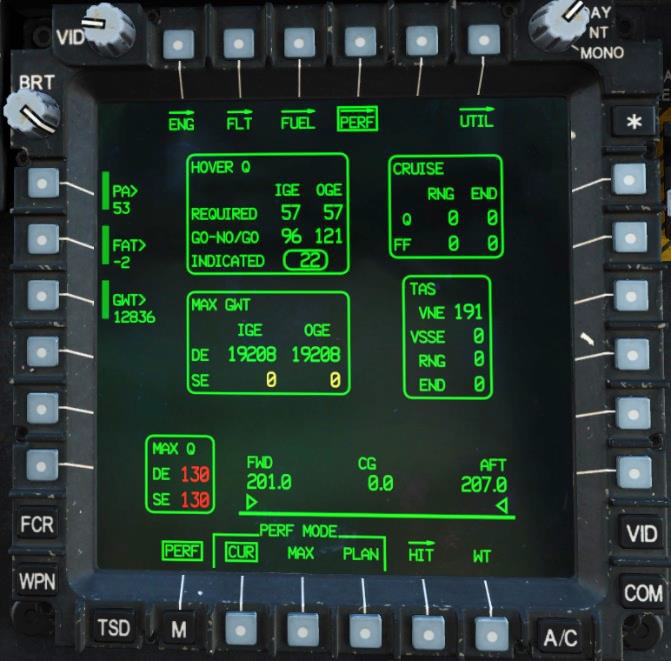
INDICATED値がGO-NO/GO OGE値より大きい場合、航空機はOGEパワーを必要とする以下のマヌーバを実行するのに十分なパワーを持っていない。
- OGEホバーへのアプローチ
- マスキング/アンマスキング
- NOEフライト
GWT(総重量)が200ポンド減るごとに、TQを1%減らすことができる。このルールを使って、Out of Ground Effect Flightを可能にするために、機体からどれだけの燃料や弾薬を取り除けば良いかを判断することができる。
離陸の種類
離陸の目的はホバーから前方飛行に移行することであり、そのための暗黙のタスクは搭乗員が機体の高高速度回避領域外に留まることである。回避領域内では、エンジントラブルによる強制着陸となり、機体にもある程度のダメージを与えることになる。回避領域外では、単発で飛行を維持できる可能性があり、また、機体にほとんどダメージを与えることなく強制着陸を行うことができます。
米軍のAH-64Dが行うVMC(Visual Meteorological Conditions)離陸には、4つのタイプがある。 - VMC離陸
- VMC Level Acceleration Takeoffは、路面状況や障害物がある場合に行われ、上昇を開始する前に速度安全単発エンジン(VSSE)の対気速度まで機体を加速させる。この離陸は、万が一エンジンが故障した時に、回避領域内で飛行するリスクを軽減するためのものである。
- 地上/ホバーからのVMC Minimum Power Takeoffは、路面状況がローリングテイクオフに適していない場合に行われる。訓練では、IGEホバーパワーのみで離陸します。
- ローリングテイクオフは、機体がIGEパワーに制限されており、路面状況がローリングテイクオフに適している場合に行われる。訓練ではホバーパワーより10%低い出力に制限されています。
AH-64Dの離陸は、VMC Level Acceleration Takeoffが推奨されている。
VMCテイクオフ
ホバリングからトランジションシンボロジーを選択し、フォーストリムリリースボタンを押しながら、90ノットの上昇姿勢(翼が水平)になるようにフォワードサイクルをかけ、コレクティブをホバーパワーより10%以上、または必要な上昇になるように増加させる。90-knotになったらフォーストリムを解除し、VSSEを通過するまではVSIを水平に保つよう必要なトリミングを行う。ペダルを踏んで地上とのアライメントを保ち、障害物から離れるか50フィート離れるか、どちらか早くなったところでトリムボールを中心に調整飛行(イントリム)する。障害物の上空でFPV(飛行経路ベクトル)を維持し、障害物のクリアランスを確保しやすくする。VSSEを超えたら、500fpm以上の上昇率になるようにコレクティブを調整する。
VMCレベル加速離陸
ホバリングからTransitionシンボルを選択し、フォーストリムリリースボタンを押しながら、90ノットの姿勢(翼が水平)になるようにフォワードサイクルを回し、コレクティブをホバーパワーより約10%、または高度維持と機体の加速に必要な分だけ増加させます。90-knotの姿勢を確立したらフォーストリムを解除し、VSSEを通過するまで水平VSIを維持するために必要なトリムを行う。ペダルを踏んで接地軌道を維持し、障害物から離れるか、50フィート離れたところで、トリムボールを中心に調整飛行を行う。ALG50feetに到達するまでに50ノットになるように、または障害物を取り除くために必要な調整を行う。障害物の上空でFPVを維持し、障害物を確実に取り除きます。障害物がなくなったら、70ノットの姿勢と500fpm以上の上昇率になるように調整する。
VMC 最小出力離陸
パワーが制限された環境での操作を想定し、ホバーパワーのみでこのマニューバを行います。
ホバリングから、まずトランジションシンボルを選択し、フォーストリムリリースを押したままにする。ゆっくりと滑らかにフォワードサイクリックをかけ、機体を加速させる。ペダルでLOSレティクルの12時方向への速度ベクトルを維持する。機体がETLに近づくにつれ、若干の高度低下が発生する場合がある。地面との接触は可能だが、推奨しない。ローター効率を上げるとトルクが減少するので、ホバーパワーを維持するためにコレクティブを調整する。必要に応じてフォーストリムを中断し、VSIを水平に保つ。50ノットに達するまで加速しながら、水平なVSIを保つためにフォワードサイクリックをかけ続ける。ペダルでトリムボールを障害物に見合った調整飛行にセンタリングする。ローターシステムとの接触を避けるため、水平線より10度以上下のピッチ姿勢は避ける。
機体が50ノットに近づいたら、70ノットの姿勢に調整し、上昇を開始します。FPVが障害物の上にあることを確認します。障害物がなくなったら、500fpm以上の上昇率になるように調整する。
ローリング離陸
パワーが制限された環境での操作をシミュレートするために、まず5フィートのホバーパワーチェックを行い、トルクを記録してください。ホバーパワーチェックの結果が71%だった場合、この値から10%を引いて、マヌーバで使用する「模擬パワーリミット」(この例では61%)を決定する。機体を着陸させ、ENG SYSページでコレクティブフライトグリップを使用してスタビレータをゼロにセットし、抵抗を減らします。
地上から、まずトランジションシンボロジーを選択し、フォーストリムインターラプトを押しながらコレクティブを30%のトルクまで増加させる。そのままコレクティブを模擬出力限界まで上げ、同時にフォワードサイクリックをかけ、90ノットの姿勢(翼が水平)にした後、フォーストリムを離す。必要に応じてフォーストリムを中断し、水平な姿勢を維持する。銃との接触を防ぐため、離陸後まで機首を水平より下げないようにする。ペダルでLOSレティクルの12時方向のポストを上下させ、速度ベクトルを真直ぐに保つ。離陸後、50ノットに達するまで加速しながら、フォワードサイクリックをかけ続け、VSIを水平にする。ペダルでトリムボールをセンターし、障害物に合わせた調整飛行を行う。ローターシステムとの接触を避けるため、水平線より10度以上下のピッチ姿勢は避ける。機体が50ノットに近づいたら、70ノットの姿勢に調整し、上昇を開始します。FPVが障害物の上にあることを確認します。障害物がなくなったら、500fpm以上の上昇率になるように調整する。上昇率が安定し、障害物がなくなり、最大耐久力/上昇率または希望する対気速度に達したらマヌーバを終了する。スタビライザースイッチを押して、スタビライザーをオートモードに戻す。
パワーが制限された環境(高/暑/重)でこのマヌーバを行う場合、ローターの下垂を防ぐため、パイロットはデュアルエンジンの最大トルクより5%低いトルクで行うことをお勧めします。
アプローチと着陸
着陸前の確認
着陸前に以下を行う。
- (PLT/CPG) 武器サブシステム-以下を確認する。
o A/S ボタン-SAFE。
o GND ORIDE ボタン-オフ。
o 武器が動作していない-ハイ・アクション・ディスプレイ(HAD)で確認する。 - (PLT/CPG) ASE – 必要に応じて。
- (PLT/CPG) TAIL WHEEL ボタン – ロック、UNLOCKED ランプが消灯。
- (PLT) パークブレーキ – 解除、ハンドルを入れる、または希望する。
アプローチの種類
アプローチの種類は主に2つあります。Hover/GroundへのVisual Meteorological Conditions (VMC) ApproachとRolling Landingです。VMC Approachをする時に注意する事は、以下の通りです。 - 着陸地点の広さ。航空機が着陸、離陸するのに十分な広さがあるか?複数の飛行機が着陸する場合、すべての飛行機が着陸、離陸するのに十分な広さがあるか?
- 着陸面の適合性。改良された着陸場ですか?柔らかい土か泥か?雪やホコリでホワイトアウトの可能性があるか?
- 着陸地点の周辺にある障害物やバリアー。木、岩、フェンス、ワイヤー、穴などがないか?
- アプローチとテイクオフの方向。それらは同じか?それとも、アプローチはある方向で、テイクオフは別の方向ですか?
- 終着点。特に複数の飛行機が着陸する場合は、使用可能な着陸エリアの最後の1/3までアプローチを行うこと。
- 風向き。風に向かって着陸するのが望ましいが、不可能な場合は、アプローチ中に必要なパワーを大きくする。
- パワーが使えるかどうか。IGEとOGEの必要なパワーを、使用可能な最大トルクと照らし合わせて評価する。
航空機のパワーに制限があり、表面積が適切であれば、ローリングランディングを考慮し、航空機はETLまたはVelocity Safe Dual Engine (VSDE)以上、シングルエンジンの場合はVelocity Safe Single Engine (VSSE)以上に維持する必要があります。
VMCアプローチからホバーへ
着陸地点がよく見える高度と対空速度で、LOSレティクルを着陸予定地点に合わせます。フォーストリムインターラプトを押しながら、コレクティブを巡航トルクの20%程度に下げます。加速度計を対地速度40ノットの位置に置き、コレクティブを500fpmまたは希望する降下速度に調整します。FPVは着陸予定地点のやや上空で維持し、アプローチ時のアンダーアークを防ぎます。垂直方向はコレクティブで、水平方向は左右のサイクリックで飛行経路のベクトルを制御する。500fpmまたは希望する降下速度を維持しながら、スムーズで一貫した減速ができるように、加速度キューを速度ベクトルの先端より後ろに維持する。障害物や50フィート以下に降下する前に、トリムボールを中央に保ちます。障害物や50フィート以下になったら、ペダルで機首を着陸方向に合わせます。アプローチの中止は、障害物より下に降下する前に決定すること。速度ベクトルがLOSレティクル内に収まったら、Hoverシンボルを選択し、5フィートの静止ホバリングまで終了させる。ホバリングを維持するために、必要に応じてホールドモードを使用する。
ローリングランディング
着陸地点が最もよく見える高度と対気速度で、LOSレティクルを着陸予定地点に合わせます。フォーストリムリリースインターラプトを押しながら、コレクティブを巡航トルクの20%程度に下げます。加速度計を地上速度40ノットの位置に置き、コレクティブを300から500fpmまたは希望する降下速度に調整します。FPVは着陸予定地点の少し上で維持し、アプローチのアンダーアークを防ぐ。着陸可能区域の最初の1/3が着陸地点となるよう計画する。垂直方向はコレクティブで、水平方向は左右のサイクリックで飛行経路のベクトルを制御する。加速度計を速度ベクトルの先端に合わせ、300〓500fpmまたは希望する降下速度を維持しながら、スムーズで安定した減速ができるようにする。障害物や50フィート以下に降下する前に、トリムボールを中央に保ちます。障害物の下、または50フィート以下になったら、ペダルで機首を着陸方向に合わせます。ペダルとラテラルサイクリックで、LOSレティクルの12時方向への速度ベクトルを維持する。タッチダウンまでETLかVSDE以上で維持し、シングルエンジンの場合は30フィートまでVSSE以上で維持する。タッチダウンしたら、コレクティブを少し下げて機体を落ち着かせ、その後コレクティブを30%デュアルエンジン(60%シングルエンジン)以上に上げ、後方サイクリックをかけ、空力的に機体にブレーキをかける。ペダルでHeadingを維持し、横スクで水平姿勢を維持する。速度ベクトルがLOSレティクル内に収まったら、Hoverシンボルを選択し、加速度キューをLOSレティクルの中心に維持する。機体が停止した後、操縦桿をニュートラルにし、コレクティブを減少させる。機体の停止を補助するために、トーブレーキを使用しても良い。
着陸後の点検
着陸後、次のことを行って下さい。
- (PLT/CPG) TAIL WHEEL ボタン-お好みで。
- (PLT) 外灯 – 必要に応じて。
- (PLT/CPG) Avionics – トランスポンダーをSTBYにする。
シャットダウン
パーキングに入ったら、以下を実行する。 - (PLT) APU – 以下のように起動する。
o APU ボタン – ON を押す。
o EUFD – APU START、APU POWER ON、ACCUM OIL PRESS LO を確認する。 - PLT) TAIL WHEEL ボタン-ロック、UNLOCKED ランプが消灯している。
- (PLT) パークブレーキ-セット、ハンドルアウト。
パワーレバーをIDLEに戻す前に、EUFDにAPU ONアドバイザリが表示されていることを確認する。 - (PLT) パワーレバー-IDLE, EUFDの2分タイマースタート。
- (PLT)待機姿勢表示器-ケージ
- PLT)CMWSコントロールインジケータPWRスイッチ-OFF。
- (PLT/CPG) NVS MODE スイッチ-OFF.
- (PLT/CPG) ACMスイッチ-OFF.
- (PLT) パワーレバー-OFF、2 分経過後。
- (PLT) RTR BRK スイッチ-NR が 50%以下のとき BRK。
- (PLT) スタビレータ-ENG SYSページで手動で0°に設定。
- (PLT)サーチライト-OFF
- (PLT) RTR BRK スイッチ-ロータ停止後、OFF。
- PLT) EXT LT/INTR LT パネルスイッチ-OFF。
- CPG) INTR LT パネルスイッチ-OFF。