操縦桿には,ピッチロールトリムスイッチ,センサーコントロールスイッチ,空対地用爆弾解除ボタン,銃/前方発射武器トリガー,空対空武器選択スイッチ,アンデザイナート/ノーズホイールステアリングボタンが装備されています。オートパイロット/ノーズホイールステアリング解除スイッチ(パドルスイッチ)は,スティックグリップの下に取り付けられています。スティックポジションセンサーは,スティックのニュートラルからの変位に比例した電気信号をフライトコントロールコンピューターに伝達する。
スイッチのいくつかは,選択されたモードに依存する複数の機能を有しています。それらについては,このマニュアルの後の関連するセクションで説明します。
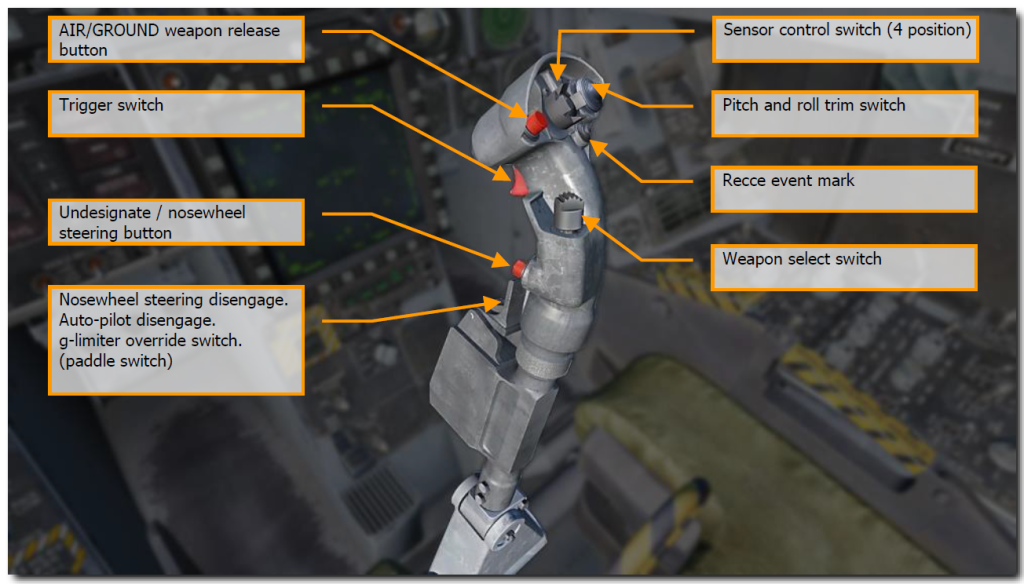
武器開放ボタン[RAlt]+[Space]。爆弾,ロケット,空対地ミサイルなど,空対地兵器を発射するときに押し続けます。
トリガースイッチ[Space]。押すと,銃や空対空ミサイルを発射します。
アンデジ/ノーズホイールステアリングボタン[S]。このボタンは機体の状態によって機能が異なる。
ノーズホイールステアリング。車輪に重量があり,飛行制御コンピュータが動作している状態で,ノーズホイール・ステアリング・ボタンを一瞬押すと,ノーズホイール・ステアリングが作動し,HUDにNWSが表示されます。
ノーズホイール・ステアリングシステムが故障すると,DDIにNWSとFCSが注意として表示され,MASTERCAUTIONライトが点灯し,HUDからNWSまたはNWSHI表示が消えます。失敗すると,ノーズホイール・ステアリング・システムは自由旋回モードに戻る。
ノーズホイールステアリングを解除します。ノーズホイールステアリング状態でないとき(ウェイトオフホイール),このボタンを使って,以前に指定した目標や場所の指定を解除することができます。これにより,レーダーがサーチに戻り,目標が解除されます。
ノーズホイールステアリング解除[A]。このパドルスイッチは,機体の状態に応じて複数の機能を持ちます。機能は以下の通りです。
-ノーズホイール・ステアリング(NosewheelSteering)。ノーズホイールステアリングの指令を解除します。タキシング中にハイモードにしたい場合は,ノーズホイールステアリングボタンを押し続けてください。翼をたたんでNWSを作動させると,NWSボタンを押して離すとハイゲインモードになります。
-オートパイロットを解除する。コマンドによるオートパイロットモードを解除し,マニュアルコントロールのフライトに戻す。
-Gリミッターオーバーライド操縦桿を後方に倒した状態でパドルスイッチを押すと,Gリミッターをオーバーライドすることができます。コマンドリミットのgは33%増加します。g-LIMOVRDコーションが表示され,MASTERCAUTIONライトとトーンが点灯します。操縦桿をニュートラル付近に戻すと,オーバーライドは解除されます。
ピッチ&ロールのトリムスイッチです。通常,ピッチ([RCtrl]+[.]と[RCtrl]+[;])とロール([RCtrl]+[,]と[/])のトリムスイッチを動かすと,電気的に操縦桿がバイアスされ,A-10Cやブラックシャークとは違って桿は動かせません。AUTOフラップモードでは,飛行制御コンピュータの自動トリミング機能により,ピッチトリムはほとんど必要ない。着陸態勢に入った時のみ,手動でピッチトリムを行う必要があります。非対称荷重の場合は,ロールトリムが必要です。MECHでは,ピッチトリムは操縦桿を前後に動かし,桿の中立点を変更します。機械的な横方向のトリムはありません。
トリムは,AoA25°までの追従性g荷重を変化させます。2gの水平飛行でバンク角60°の旋回中にオートパイロットを解除すると,2gのトリムがかかったままとなり,水平飛行中に機首を下げるのにかなりのスティック力が必要となります。主翼が水平の状態で高度保持か姿勢保持を解除すると,トリムは1Gに戻りますが,ゲームプレイをサポートするために,APを解除すると1Gに戻るようにすることをお勧めします。
フラップが下がっている場合,ピッチトリムは他のトリムスイッチと同様に機能し,トリムスイッチを押し続けると,スイッチを離すまで連続的にリニアに変化します。フラップを下げた状態でのトリム入力は,飛行制御コンピュータが目標とする迎角に設定されます。フラップアップの場合,1秒以上のトリム入力は無視されます。フラップアップでのトリム入力は,追従Gが変化します。
Recceイベントマーク[R]。初期アクセスでは,これを押すとヘルメットマウントディスプレイをブランクにすることができる。
ウェポンセレクトスイッチ。A/A機マスターモードでA/A兵器を選択する4ポジションスイッチ。スイッチの機能はディスクリート入力。
-前方は[LShift]+[W]。AIM7を起動し,優先ミサイルを表示します。レーダーアンテナ4バーエレベーション,140°アジマススキャン,40マイルレンジ選択,インターリーブPRFをコマンドします。
-センタープッシュは[LShift]+[S]:AIM9を起動し,優先ミサイルを表示します。レーダーアンテナ4バーエレベーション,80°アジマススキャン,AIM9L,AIM9M,AIM9Xの40マイルレンジ選択,インターリーブPRFをコマンドします。
-アフトは[LShift]+[X]:砲を起動し,砲を表示します。レーダーシステムへGACQをコマンド,レンジは5nm,レーダーアンテナのアジマス走査は5本,エレベーション走査は20°(垂直走査)です。センサーコントロールスイッチをACM状態に設定する。
-右は[LShift]+[D]:AIM120を起動し,優先ミサイルを表示します。レーダーアンテナ仰角2本,方位角80°スキャン,AIM120B/Cの射程40マイル選択,インターリーブPRFを指令します。
注:L&Sとして目標を追尾する場合,武器選択スイッチは武器を変更するだけで,武器選択によるレーダー操作に影響を与えないこと。
センサーコントロールスイッチ(4ポジション)。これは4ポジション,モーメンタリ,センタリングスイッチです。スイッチの機能はディスクリート入力です。
-フォワード[RAlt]+[;]です。NAVまたはA/Gモードでは,ヘッドアップディスプレイ(HUD)にスロットルデジグネーターコントロール(TDC)を優先的に割り当てます。A/Aモードでは,HUDをACMサブモード,レーダーをボアサイトとします。
-Aft[RAlt]+[.]です。A/Gモードでは,TDCの優先順位をAMPCD(AdvancedMultipurposeColorDisplay)に割り当てます。A/Aモードでは,AMPCDSAページにTDCを割り当てます。A/AACMサブモードの場合,レーダーを垂直捕捉(VACQ)状態にします。NAVモードの場合,AMPCDをHSI形式とSA形式に切り替えます。
-左は[LAlt]+[,]:LDDIにTDCの優先順位を割り当てます。TDC優先がすでにLDDIに割り当てられていて,LDDIがレーダー表示の場合,TDCがレーダーリターンの上にあるとき,レーダーを追跡モードSTTにするように指令します。レーダーが追尾中の場合,ブレークロック(指定解除ではない)を指令する。A/AACMサブモードでは,レーダーシステムに対してワイドアクイジション(WACQ)を指令する。LDDIにTGPFLIRが表示されている場合は,A/AまたはA/Gのいずれかで追尾を指令する。
-右[RAlt]+[/]:RDDIにTDCの優先順位を割り当てます。TDCの優先順位がすでにRDDIに割り当てられていて,RDDIがレーダーディスプレイの場合,TDCがレーダーリターンの上にあるとき,レーダーをSTTのトラックモードにするよう指令します。RDDIにTGPFLIRが表示されている場合は,A/AまたはA/Gのいずれかのトラックを指令します。
注:すべてのACMモードは自動的にターゲットをロックします。
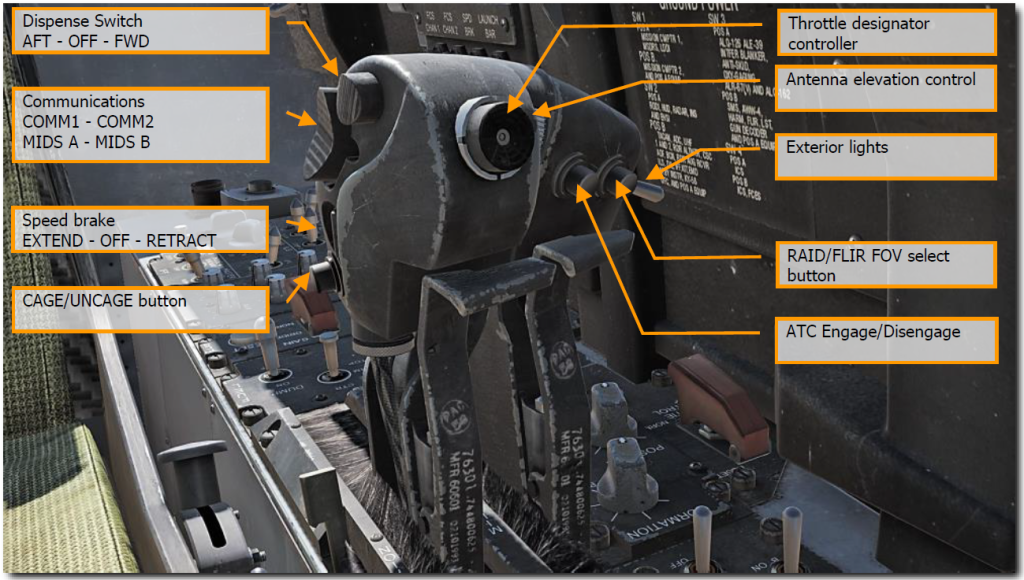
スロットルグリップにはスイッチがあり,スロットルから手を離すことなく様々なシステム制御が可能です。操縦桿と同様に,スロットルのHOTAS機能も,機体の状態や操作モードによって機能が異なります。これらについては,本書の適切なセクションで説明します。
ディスペンス・スイッチ,AFT-OFF-FWD。この3方向スイッチにより,ALE-47対策システムを手動および半自動で使用することができます。
-フォワード[E].カウンターメジャー・プログラム5を起動します。
-中央。機能しません。
-後方[D]。EWページで選択された対策プログラムを起動します。
ディスペンサーセレクターノブがBYPASSにあるとき,スイッチは代替機能を持ちます。
-Forward[E].チャフを1枚吐出します。
-中央。機能なし。
-AftD。フレアを1枚発射します。
通信,COMM1-COMM2-MIDSA-MIDSB。4つの無線機での送信を制御する4ポジションスイッチです。
-フォワードします。COMM1で送信します。
-Aft.COMM2で送信します。
-下方向。MIDSAを送信
-上MIDSBを介して送信
スピードブレーキEXTEND-OFF-RETRACT.スピードブレーキは,垂直尾翼の間に取り付けられています。スロットルに取り付けられたスイッチで操作します。スピードブレーキは,AUTOFLAPSUPモードでは6.0g以上,28°AOA以上,AUTOFLAPSUPモードでない場合は250knots以下で自動的に後退します。フラップが伸びているときは,スピードブレークスイッチを後方にしないと,スピードブレーキは自動的に引き込まれます。スイッチをEXTENDにしている間は,フラップがHALFまたはFULLの状態でスピードブレーキが伸びます。スピードブレーキは任意の中間位置まで伸びるよう指令できますが,スピードブレーキスイッチを前方に瞬間的に押すと完全に引き込みます。スピードブレーキは地上では通常通り動作します。
フラップを広げ,車輪に体重をかけた状態(着陸後やアボート時など)では,スピードブレーキスイッチを後方に押さなくともスピードブレーキは伸びたままです。
-Aftは[LShift]+[B].スイッチを後方に持っている間,スピードブレーキを伸ばします。スプリングでセンターデテントに固定されています。
-フォワードは[LCtrl]+[B].スピードブレーキを戻す,または戻した状態を維持してクリープを防止します。
-中央[B].スピードブレーキは,速度が400ktを超えるときに開くとクリープして閉じます。
CAGE/UNCAGEボタン[C].このスイッチには,アクティブなシステムや武器に応じた複数の機能があります。
-NAVモード。HUD上の速度ベクトルをケージに入れたり外したりするのに使用する。
-A/Aモード,AIM9。サイドワインダーのシーカー位置を制御します。AIM9のシーカーヘッドはL&S指定まではボアサイト,それ以降はL&Sにスレーブされる。L&Sの状態でケージボタンを押すと,シーカーヘッドがL&Sとボアサイト間で切り替わる。AIM9シーカーヘッドがボアサイトにある状態でケージボタンを長押しし,機体を操作して目標の熱源に向け,AIM9のトーン上昇を実現した後,ケージボタンを離すとAIM9シーカーヘッドがミサイルのジンバルに熱源を追尾します。
-A/Aモード,AIM7。スパローミサイルを選択したA/Aモードでは,レーダーをL&SターゲットのSTTにコマンドする。
-マーベリックのA/Gモード。マーベリックをボアサイトに保持するか,保持を解除してスルーさせる。
スロットルデジグネーターコントローラー(TDC)。TDCをいずれかの表示にすると,TDCがスルーコントロールとして機能し,カーソル/センサーを移動させます。コントロールは,上[;],下[.],左[,],右[/],そして[Enter]キーを押すことです。
-左または右の力が加わっている状態で,押されていない状態。コントロールに加えられた圧力に比例して,獲得シンボルを左または右に配置します。
-上または下方向に力が加わっている状態で押されていない。コントロールに加えられた圧力に比例して,捕捉記号を上または下に配置します。
-押された状態。捕捉フェーズを開始する。コントロールに加えられた力の方向によって,捕捉シンボルまたは指示カーソルが配置されます。
-離す(カーソルはディスプレイのタクティカルエリアに表示される)。操作モードにより,レーダーロックオン,ターゲット指定,アクティブ処理を指令する。
F/A-18ホーネットの特殊設定で「リアルなTDCスルー」オプションを有効にすると,AGM-65マーベリックなどの特定の表示形式をスルーするには,TDCを押し続ける必要があります。
アンテナの仰角制御。AN/APG-73レーダーは,アンテナアンテナを上下に回転させ,レーダーエレベーションスキャンを変更することができます。このロータリーにより,パイロットはアンテナの仰角走査の位置を決めることができる。コントロールは上[=]と下[-]である。
外灯スイッチは[L].左スロットルグリップの外側にある外灯マスタースイッチは,ポジションライト,フォーメーションライト,ストロボライト,給油プローブライトのマスターコントロールになります。
-OFF(AFT)。このスイッチで制御されるライトの電源が切れます。
-ON(FWD)。スイッチで制御される照明の電源が入ります。
RAID/FLIRFOV選択ボタン[I]。制御するセンサーや武器によって,このボタンには複数の機能があります。
-レーダーセットの動作モードがTrackWhileScan(TWS)またはSingleTargetTrack(STT)の場合,RAIDモードを選択します。
-HARMを選択した場合,HARMターゲットを中心から外側に循環させます。
-ATFLIRまたはTGPがアクティブな場合,FOV設定を切り替えます。
-マーベリックモードでは,FOVが切り替わります。
ATCエンゲージ/ディスエンゲージ[T]。フラップスイッチがHALFまたはFULLで,後縁フラップが27°以上開いている状態で,左スロットルのATCボタンを押して離すと,ATCアプローチモードが作動します。ATCが作動すると,飛行制御コンピュータはエンジンの推力を調節してオン・スピードAOAを維持します。コンピュータは,AOA,通常負荷率,スタビレータ位置,ピッチレート,バンク角の入力からコマンド信号を生成する。これらの信号は,エンジンに取り付けられたスロットル・コントロール・ユニットを駆動し,エンジンの燃料制御を指令する。コンピュータは,AOAを主な入力としてコマンド信号を生成する。しかし,通常の負荷率
スタビライターポジションは,パイロットが引き起こしたピッチ変更に対して推力を増加または減少させ,ピッチレートはピッチ操縦時のリードを,バンク角はバンク操縦時の追加推力を提供します。通常の離脱は,ATCボタンを押すか,どちらかのスロットルに力を入れたまま離脱します。自動離脱は次のような場合に行われます。
-フラップAUTOアップ
-AOAセンサーの故障
-後縁フラップが2つ以上故障した場合。
-後縁フラップのたわみが27°以下である。
-ATCボタンが故障した
-FCESチャンネル2または4が故障
-ワウ
-FCSがいずれかの軸でMECHまたはDELに戻る
-左右のスロットル角が10°以上,1秒以上違う
-バンク角が70°を超えた
-内部システム異常
-ゲインORIDE選択
ATCクルーズモード。フラップスイッチがAUTOの状態で左スロットルのATCボタンを押し,離すとATCクルーズモードが作動します。ATCがクルーズモードになると,飛行制御コンピュータは既存の対気速度を使用して,この既存の対気速度を維持するためにエンジンの推力を調節します。既存対気速度とは,ADCからミッションコンピュータを経由して飛行制御コンピュータに送られる対気速度のことである。ADCが故障すると,ATCの巡航モードが阻害される。FCCは,交戦時にADCからミッションコンピュータを経由して送られてくる真の対気速度を用いて,コマンド信号を生成する。この信号を基準にしてエラー信号を発生させ,エンジン搭載のスロットル制御ユニットを駆動させる。通常の離脱は,ATCボタンを押すか,どちらかのスロットルに力を入れ続けることで行われる。自動的な切り離しは,次のような場合に行われます。
-フラップがHALFまたはFULL
-ATCボタンが故障した。
-FCESチャンネル2または4が故障した。
-FCSがいずれかの軸でMECHまたはDELに復帰した。
-左右のスロットル角が10°以上異なる状態が1秒以上続いた。
-ADCの対気速度不良
-ADCデグレード
-内部システム障害