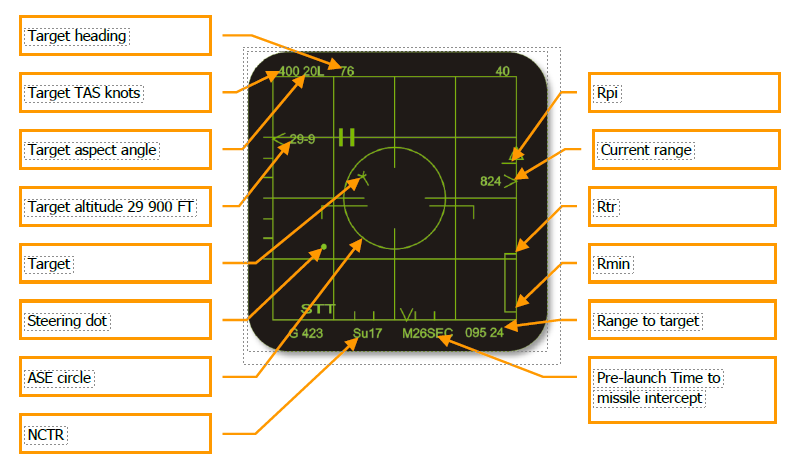
目標の速度、アスペクト角、方位が VSD の左上に沿って表示されます。標的の高度は、標高スケールに沿って海面との関係で表示されます。
高度 29,900 フィートは 29-9 と表示されます。さらに、目標の射程距離と複合閉鎖は VSD の右下に表示される。 ミサイルの採用データはSTTモードで提供され、ショットを取るタイミングの合図を提供します。 VSD上の大きな円は、許容操舵誤差(ASE)の円ですこれはHUDで確認したのと同じように動作します 円が大きいほど、許容ステアリングエラーとキル(Pk、発音はP sub K)の確率が大きくなります。
ASEの大きさは、選択したミサイル、ターゲットのマニューバ、ターゲットのアスペクト、速度などに依存します。より高いPkを確保するために、簡単な韻を踏んで覚えてみてください。”ショットを撃つ前にドットをセンターにする” VSDの右側には、ロックされたターゲットに対する選択されたウェポンのダイナミック・ランチャー・ゾーン(DLZ)を示す垂直方向の目盛りが表示されます。 スケールに沿った水平のバーが発射の合図を提供します。 下から上へ。 Rmin – 最小射程距離、Rtr – 高Gターゲットの操縦を想定した最大射程距離、Rpi – 非操縦ターゲットに対する最大射程距離。スケールの上部には、Raeroを表す三角形があります。
Raeroは、標的に関係なく、ミサイルの最大弾道射程距離を象徴しています。スケールの下、VSDの右下の部分には、目標のベアリングと目標範囲のデジタル読み出しが表示されます。選択したミサイルが目標に到達するまでにかかる推定時間は、VSDの下部に表示されます。 秒単位の時間は、AIM-120 が選択されている場合は M、AIM-7 が選択されている場合は T、AIM-9 が選択されている場合は S の前に表示されます。打ち上げ後の情報はHUDにのみ表示されることに注意してください。
Track While Scan (TWS) Mode
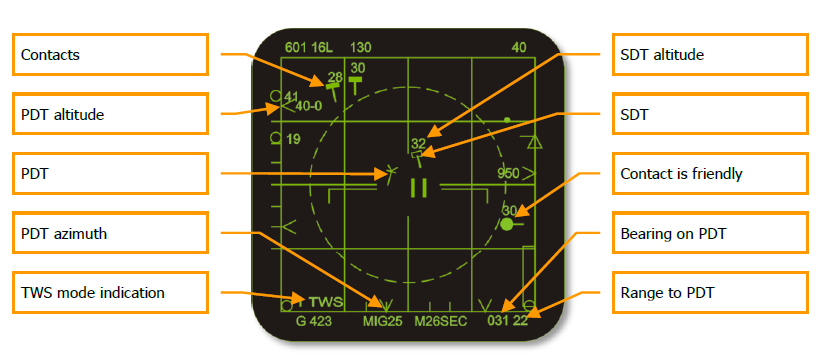
TTWSモードは非常に情報量の多いモードですが、LRSよりも複雑なモードです。このモードは、LRS と STT モードに固有の情報を組み合わせたものです。このモードでは、コンタクトの詳細なターゲットデータを持ちながら、他のターゲットをスキャンすることができます。RAlt-I]キーでTWSモードを開始すると、VSDの左下隅にあるモードインジケータが “TWS “に変わります。一般的に、TWS VSD の表示は LRS VSD と非常によく似ています ただし、各接点には、その接点の進行方向を示すベクトル線と、その横にデジタル高度表示があります。
TWS モードは、複数の目標に向けた AIM-120 ミサイルの同時発射に使用することができます。コンタクトを指定するとレーダーがSTTモードに切り替わるLRSとは対照的に、TWSではコンタクトを最初に指定すると、そのコンタクトはプライマリ指定ターゲット(PDT)に設定されますが、スキャンエリア内の他のコンタクトを検索して表示し続けます。 さらに、他のコンタクトを指定することにより、これらは二次指定ターゲット(SDT)として設定される。SDTターゲットは中空の長方形で表示されるのに対し、PDTは星形で表示される(STTモードの場合と同様)。
PDT または SDT を 2 回目に指定することで、そのターゲットへの STT トラックが開始される。 複数のAIM-120ミサイルをボレーで発射した場合、1回目はPDTに行き、後続のミサイルは指定した順番でSDTを迎撃する。 迎撃までの時間タイマーはPDTに関してのものとなる。
TWSモード中はAIM-7を発射することはできません。このようなミサイルを発射するには、ターゲットを2回指定してSTTモードに移行しなければなりません。
TWSにはいくつかの制限があります。レーダーはコンタクトごとにトラックファイルを作成しようとするが、スキャン量が多いとスキャン間の更新時間が長くなる。 各スキャンの間、レーダーは次のスキャンのためにコンタクトの位置を予測しようとします。 しかし、ターゲットが回避的な高G作戦を取り、軌道と速度を素早く変更した場合、レーダーは誤ったトラックファイルの予測を行うことで軌道を失う可能性があります。 そのような防衛戦術を使用して、ハンターはすぐに狩られた者になることができる。レーダーはPDTに方位角スキャンを集中させようとします。
TWSは、AIM-120と組み合わせることで、複数のターゲットを同時に攻撃する強力な能力を提供します。 それにもかかわらず、目標追跡の信頼性はLRSよりも低く、STTよりもさらに低い。しかし STT とは異なり、AIM-120 を用いた TWS の発射は敵機にレーダーロックと発射指示を与えない。 そのため、敵パイロットが最初に受ける警告は、AIM-120 のアクティブなレーダーシーカーがターゲットの近くでアクティブになった時であろう。
Home On Jam (HOJ) Mode
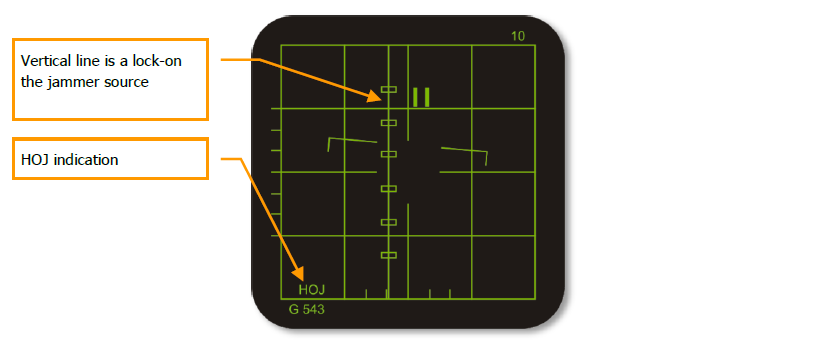
レーダーおよびレーダー警告受信機(RWR)がアクティブな電子対策(ECM)を検出すると、VSDにジャマーの方位に沿って垂直方向に連続した中空の長方形が表示される。この ECM 表示はノイズジャマーの表示であり、ストロボと呼ばれる。 独自の ECM ストロボを使用してターゲットをロックするには、TDC を中空の長方形のいずれかに置き、[Enter] キーを押して指定します。 レーダー上のターゲットをロックしているわけではないことに注意してください。 ECMエミッターがロックされると、一連の長方形の中に縦線が入り、ECMエミッターはその方位に沿っています。 VSDがホームオンジャムモードになり、HOJインジケーターがVSDとHUDに表示されます。 AIM-120とAIM-7Mミサイルは、敵のECMによりレーダーロックができない場合、このモードで発射することができる。 このモードで発射された場合、ミサイルは効率の悪いピュア・パスーツ軌道を飛行し、殺傷の確率ははるかに低くなることに注意してください。 また、射程情報は提供されないことにも注意してください。 そのようなものとして、友好的なAWACSへの呼び出しは、距離情報を得るために提案されています。 そのようなモードでの攻撃は、HOJ攻撃が完全に受動的であるため、警告なしで敵を提供します。 attack.
BELSIMTEK
HOJモードは目標の方位を提供しますが、範囲、角度、速度、傾斜に関する目標データを提供しません。
短距離では、レーダーのエネルギーがノイズジャマーのエネルギー出力を上回り、レーダーはターゲットからトラックを形成するのに十分なレーダーの反射エネルギーを得ます。 これは “バーンスルー “と呼ばれています。 バーンスルー時には、レーダーは事前の指定モード(LRSまたはTWS)に関係なく、自動的にSTTモードに移行します。 ECMバーンスルーは通常15~23海里です。
Vertical Scan (VS) AACQ Mode
垂直スキャンモードの[3]キーでは、幅2.5度、垂直方向に-2~+55度の範囲をレーダーでサーチします。ロック範囲は10海里です。レーダーは自動的にこのゾーンの最初で最も近いターゲットにロックします。ロックされると、ターゲットは自動的にSTTモードで追跡されます。
このモードは、航空戦闘操法(ACM)のドッグファイトの間に最も頻繁に使用されます。 そのような戦いの間、あなたはしばしば目標を揚力ベクトル上に配置し、目標をHUDに「引き寄せ」ようとしています。 VS モードでは、ターゲットが HUD のフレームよりもかなり上にある場合でも、より早くターゲットをロックオンすることができます。
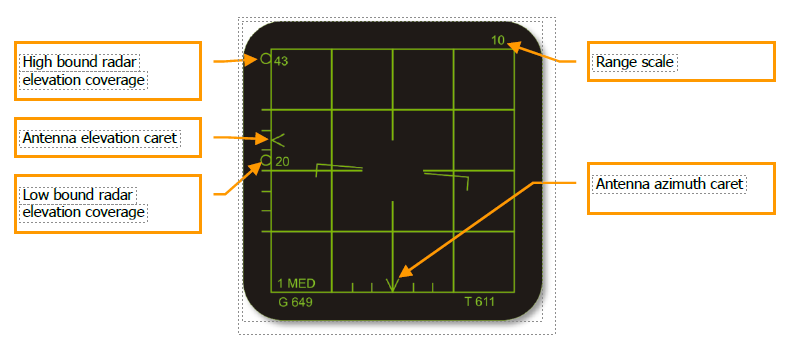
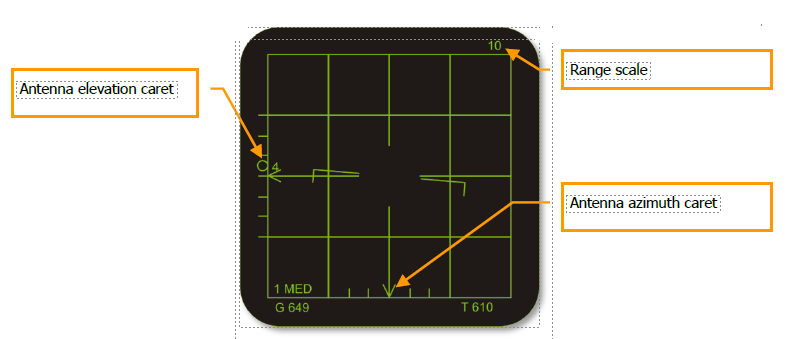
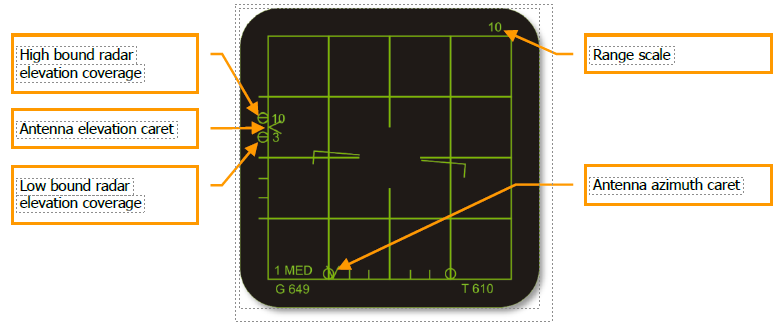
レーダー標高の高いマーカーと低いマーカーは、スキャンゾーンを示しています。方位角目盛中央の固定アンテナ方位カレットは、レーダーアンテナが方位上でスキャンしていないことを示しています。
Bore Sight (BORE) AACQ Mode
ボアモードでは、[4]キーを押すと、ターゲットがボアレティキュール内にあり、10海里以内にある場合、ターゲットのロックが自動的に行われます。 ボアは視覚範囲(WVR)内のターゲットを素早くロックするのに便利で、ロックするターゲットをある程度細かくコントロールすることができます。
AUTO GUNS (GUN) AACQ Mode
オートガンモードは、M61 20mm砲を使った近距離戦闘に特化したモードです。 レーダースキャンゾーンは固定砲レチクルを中心に、幅60度(±30度)、20度の高さになります。最大ロックオンレンジは10海里です。目標がロックされた後、レーダーはSTTに遷移します。
FLOOD Mode
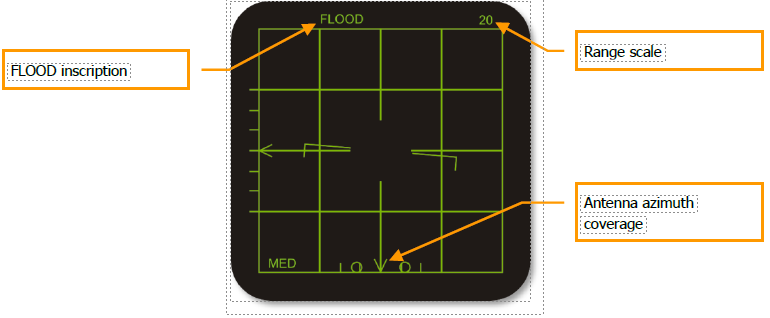
フラッド、[6]キー、AIM-7Mでの近距離戦闘で使用されるモードです。アンテナは連続波(CW)エネルギーでフラッ ドされる12度のコーンに制限されている。フラッドモードでは、レーダーは実際にターゲットにロックされることはなく、むしろ、ミサイルのシーカーは、最大のレーダー断面積(RCS)を持つフラッドレティキュール内のターゲットにホームインする。フラッドの射程距離は10海里に制限されている。”FLOOD “はVSDとHUDに表示される。73p
COUNTERMEASURE SYSTEMS
電子戦(EW)は、多くの国のセンサー、戦術、兵器、その他の機器が対立し、急速に進化してきた長い歴史を持つ、奥が深く複雑なテーマである。 このセクションでは、いくつかのアクティブなレーダー妨害電子対策(ECM)、あるいは最近では「電子攻撃」(EA)と呼ばれているように、それらが搭載されている航空機を保護するためのシステムのみを考察する。 プレイヤーが搭乗している航空機にこのようなECMシステムが装備されている場合
このジャマーは、ミッション中に[E]キーを押すことでオン/オフを切り替えることができる(内部で、またはポッドとしてウェポンステーションに搭載)。 アクティブジャマーは、敵レーダーの追尾範囲を狭めたり、来襲するレーダー誘導ミサイルの性能を低下させたりする働きをします。 しかし、このようなアクティブECMの使用には代償が伴う。 ECMは発射中や発射後にプレイヤー自身のレーダー誘導ミサイルと干渉する可能性があり、追跡距離が減少した敵対レーダーはそれにもかかわらず検出距離が増加し、敵対ミサイルはアクティブECMをビーコンとみなし、二次的な “Home On Jam”(HOJ)モードで追いかけてくる可能性がある。 ミサイルに対する最良の防御のためには、アクティブECMはパッシブジャミング(チャフ)と低高度での垂直(ビーミング)マヌーバと組み合わせるのが最良である。
AN/ALQ-135 Internal ECM System
AN/ALQ-135内部ECMステーションは、F-15イーグルの戦術的電子戦システム(TEWS)の統合要素として使用されており、イーグルは最初からアクティブな妨害装置のために内部スペースを確保して設計された最初の空軍優越性戦闘機となりました。
このシステムは、2~20GHz帯で運用されている様々な固定周波数および可変周波数の脅威レーダーに対抗するために、ノイズ弾幕と欺瞞妨害信号の両方を生成することができます。
(NATO EからJバンド)。送信アンテナは、レーダー誘導型の「地対空」(SAM)および「空対空」(AAM)ミサイルからの防御のために360°の範囲を提供します。このシステムは、脅威環境の変化に迅速かつ柔軟に対応するために、20個の再プログラム可能なプロセッサを並列に搭載しています。
AN/ALQ-135ジャマーは、AN/ALR-56Cレーダー警告受信機から受信した脅威データに応じて、イーグルのTEWSにも同様に統合されています。
当初の構成では、AN/ALQ-135は6つのライン交換可能なユニット(LRUまたは「ブラックボックス」)で構成されており、3つのオシレーターと3つのアンプで構成されていた。
F-15Cはその後、F-15EストライクイーグルのAN/ALQ-135B機器の一部をアップグレードとして受信し、最新の短距離SAM、AAA、迎撃機レーダーに対するバンド3(NATO HからJ)のカバレージを提供しました。 新たに2本の送信アンテナがフロントガラス前方と機首ラドーム後方に設置され、ホーンアンテナが右舷胴体テールブームに設置されて後半球をカバーしました。これらは、胴体機首下に設置された既存の「バンド1.5」(バンド1と2に代わる)送信ブレードアンテナに加えて設置されていました。
1991年の「デザート・ストーム作戦」では、このAN/ALQ-135を搭載したF-15戦闘機がレーダー誘導式SAMやAAMで撃墜されたことはなかった(当時F-15Cのバンド1.5のカバレージが不足していたF-15Eストライクイーグルス2機は地上からの砲火で失われた)。
AN/ALQ-135 と TEWS システムの作業は、1990 年代半ばまで続けられました。1994年の運用評価の後、米空軍司令部は、”最新のECMシステムに求められる技術的要件を満たしているか、またはそれを超えている “と指摘しました。
ECMの状態は、TEWSディスプレイの中央にオープンXとして表示されます。X が点灯しているときは、ECM がアクティブになっています。

RADAR WARNING SYSTEMS
航空機や船舶、地上の乗り物に搭載されているレーダーは、様々な種類のターゲットへの捕捉や武器誘導に使用されています。最近の航空機の多くには、敵レーダーの照射を検知するレーダー警告システム(RWS)が搭載されています。このようなシステムの設計には企業や局によって独自のアプローチがありますが、すべてのRWSには共通の運用原理があります。
RWSはパッシブシステムであり、環境にエネルギーを放出しない。RWSはレーダーエミッタを検出し、既知のレーダータイプのデータベースに従って分類します。また、RWSは、エミッタへの方向とその動作モードを決定することができる。 例えば、単一のターゲットトラックファイルの確立。しかし、RWSは、放出レーダーまでの距離を定義することはできない。
ゲームに含まれるRWSシステムは、その機能的能力において類似している。 各システムは、固有のレーダー放射を検出し、連続波(ロック警告)イルミネーションを検出し、ミサイルコマンドデータリンク信号(発射警告)を検出することができます。
より良い状況認識のためには、RWSのモード選択を使用することをお勧めします。 モード選択により、RWSは、ターゲットトラックモードで動作しているレーダー、またはSARHミサイル発射またはアクティブレーダーホーミング(ARH)ミサイルシーカートラックのためのコマンド誘導信号を送信しているレーダーのみを識別することができます。
RWSにはIFF(Identify Friend-or-Foe)機能はないことに注意してください。
RWS は、優先度ロジックを使用して、第一の脅威と第二の脅威のリストを降順に決定することができます。 1.脅威がARHミサイルであるか、ミサイル指令誘導信号が検出された場合(ミサイル発射)。
2.脅威レーダーがシングルターゲットトラック(STT)モード(またはその他のロックモード)で送信している。
3.脅威には、脅威の「共通タイプ」に基づく優先順位があります。タイプのリストは以下の通りです。
脅威は空中レーダーである。
脅威は長距離レーダーです。
脅威は中距離レーダーである。
脅威は短距離レーダーである。
脅威は早期警報(EW)システムである。
脅威がAWACSである。
4.信号強度が最大であること。
RWSは発信者までの距離を定義しない。
AN/ALR-56C Warning Receiver
RWRスコープでは、上から見て中央位置が自機の位置を示しています。 中央位置(自機)の周囲には、自機を照らすレーダーが表示されます。 スコープ上で自機の上にあるエミッターは前方にあるレーダー、自機の右にあるエミッターは右翼から外れていることを示しています。
AN/ALR-56C RWRは、F-15C/Dイーグル用のTEWS(Tactical Early Warning System)の一部です。
RWRシステムは、方位角-+/-180、高度範囲-/-45の間でレーダー信号を常時検出します。
RWRスコープ上の脅威の最大数。16.
脅威履歴継続時間表示時間:7秒。
RWR機能モード。 すべて(捕捉)またはロック。
RWRスコープの中心からのレーダーエミッタの距離は、エミッタの信号強度に対応しています。より大きなパワーを発するレーダーは、スコープの中心に近い位置に表示されます。
早期警戒レーダーやAWACSのシンボルは、内輪領域に表示されることはありません。
新たな脅威が検出されると、高音のオーディオトーンが1回鳴り、脅威シンボルの上に半球マークが表示される。
RWRが捕捉モードでレーダーを検出すると、チャープ音が鳴ります。
脅威が自機にロックオンすると、RWRのトーンは周期的なチャープ音から一定のチャープ音に変化します。
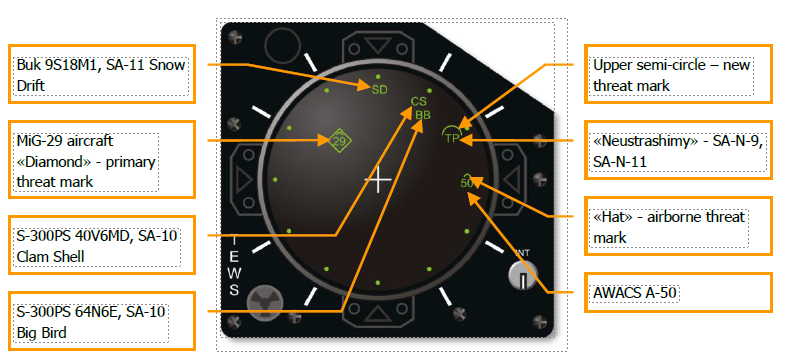
上の画像はTEWSのディスプレイ上での状況の一例です。
1時からは、64N6E(Big Bird)と40V6MD(Clam Shell)の低空捕捉レーダーで照らされています。 これらのレーダーはいずれもS-300PS SAM (SA-10C)バッテリーの一部です。
の艦載レーダーで2時から自機が照らされています。
“ノイストラシミー “級の巡視船。 新たに検出されたエミッターなので、上に半円がついています。
3時からは、自機がA-50U AWACSに照らされています。
ダイヤモンド」に囲まれた第一の脅威は、10時から11時の間にMiG-29です。
以上の分析から、第一の脅威はいつでも兵器を使用できるMiG-29であるという結論が導き出されます。したがって、この脅威に対して攻勢をかけるか、その地域から退出してMiGを撃たせないことが必要である。 MiGへの攻撃は単独で行うこともできるし、僚機の助けを借りて行うこともできる。
MiG-29に加えて、S-300複合機も潜在的な脅威である。それは1時の位置にあります。 今後の作戦を計画する際には、SAMの発射ゾーンに入る可能性を考慮しなければなりません。