Part1
TBM 930 チュートリアル
このチュートリアルは、フライトシミュレーションの体験をサポートするために作成されました。数多くのテスターによってチェックされていますが
このチュートリアルの範囲は、A-Bフライトを完了するのに十分な詳細を提供することであり、自己学習や教育のための余地が十分にあります。
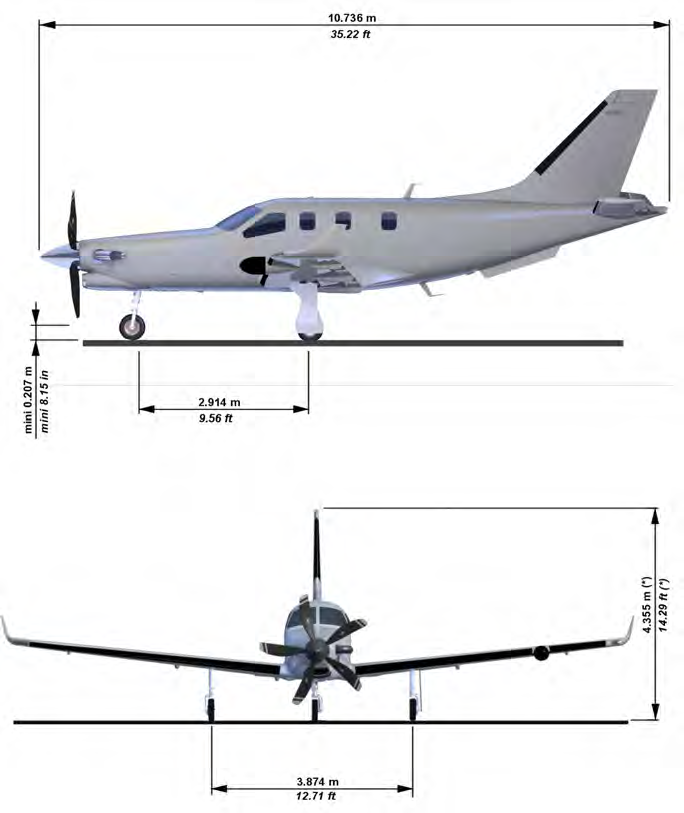
TBM930は、パワフルで速く、汎用性の高い機体で、シングルエンジン機としては前例のない快適さをパイロットと乗客に提供します。このパワフルで楽しい航空機は、新しいシミュレータで飛ぶ喜びを与えてくれますが、このチュートリアルシリーズで慣れるためにはいくつかの練習が必要です。チュートリアルフライトは、初めての方から本格的なシミュレーターをお使いの方まで、機体を体験していただき、自信を持ってお使いいただけるような知識を身につけていただくためのものです。
このチュートリアルでは、TBM930を対象に、以下の内容を説明します。
基本的なフライト・プランニング SkyVectorの使用)Cold and Dark Siart-Up チェックリストの作成と完了 ルートのプログラミング Push Back and Srarr-Up オートパイロットの機能 VORを使ったナビゲーション 空港のチャートの初見 G.5000の使用 ご覧のように、シングル・ピストン機であっても、学ぶべきことはたくさんあります。 TBM 930は、0a rmi n c>5000タッチスクリーン・アビオニクス・スイートを搭載したIB M 900のアップグレード版です。
TBM930で綺麗に飛ぶコツ
現実の世界では、「930型」のレトルト機を購入するには、400万ドル以上の費用がかかりますが、これを「飛行」という形で実現することはできません
TBMはプライベートおよびチャーター機として使用されることが多いのですが、フランス政府もTBMの多機能性を評価して使用しています。
PART1 フライトプランニング
これから、新しい機体へようこそ。TBM930は、高速で野心的かつエキサイティングな機体で、計画を立てる必要があります。
テルライド空港(KTEX)からアスペン空港(KAS6)へ
今日のチュートリアルフライトでは、テルライド空港(KTEX)からアスペン空港(KAS6)までの15マイルの比較的短いフライトの計画をプランニングして出発します。
最初にフライトシミュレータを起動し、以下の内容でフライトを設定します。
- 出発空港 Tel I j ride Airport (KTEX)Parking 9
- 到着空港。アスペン空港 (KASE)
- 現地時間: 07 00am 天気状況 Scattered Cloud Multiplier: off Air Traffic: オフ
- この仮想シナリオでは、お客様ご自身と他の4人のVIPがアスペン空港に向かいます。
総飛行時間は30分を予定しています。 次に「Fly」をクリックする前に、「Nav Log」をクリックして、巡航高度を16,000フィートに調整します。
注意 これは非常に重要なことで、背の高い山や高い地形がたくさんある地域を飛行することになるので、これらを避けて飛行したい。
- パワーダウンした状態でシミュレーターに入ります。
- 機体に命を吹き込む前に、もう少しフライトプランを練る必要があります。
- 飛行計画ツールSkyvector{website}を使って飛行計画を立てます。
- Skyvector{website}を使用して、この作業を行います。
Skyvector{website(スカイベクター)
スカイベクターとは、パイロットが世界の様々な場所を航行するのを支援する無料のオンライン飛行計画ツールです。
このツールを使うことで、パイロットやバーチャルパイロットはデータを入力してルートを計画することができます。
このような機能は、新しいフライトシミュレータにも搭載されていますが、SkyVectorは搭載されている機能を超えて、さらに多くのデータを提供してくれます。
このチュートリアルでは、SkyVeeroiを使って、テルルリドからアスペンまでの道案内をするために、近くにある「Very high-frequency Omni-duectional Range」(VOB)システムを探すことになります。ボーダー間のナビゲートはよく行われます。
この種のジェット機を操縦するときにはよく使われることですが、G3000が装備されていることで、このナビゲーション・エイドをこれまで以上に簡単に行う事ができます。このチュートリアルでは、後ほどVOPの仕組みや使い方をご紹介します。今は、StyVectorで重要なデータを取得してください。
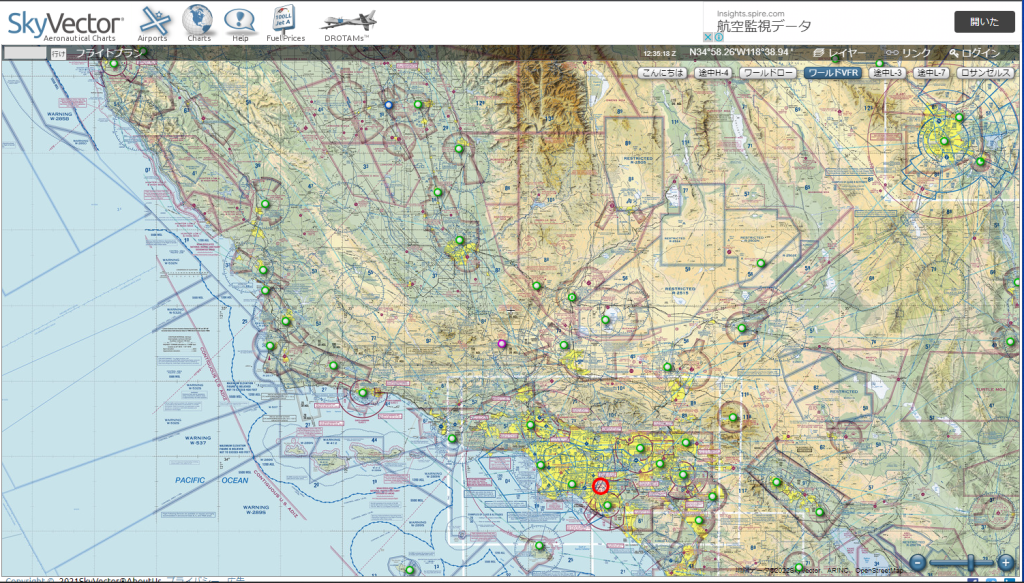
SkyVectorでルートをプロットする
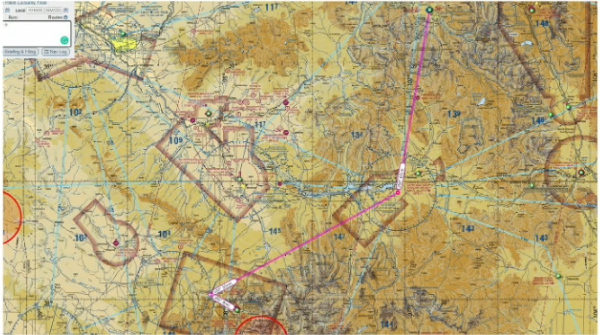
まずStyvectorでルートをプロットします。左上のボーイから、出発地と到着地の情報をIGAOコードで入力します。入力後、エンターキーを押すと自動的にエリアが拡大され、TellurideとAspenの間にマゼンタ色の一本の線が引かれます。
飛行計画を立てるとき、多くのパイロットは飛行がスムーズに行えるようにウェイポイントやその他の重要なポイントの間を目標にして飛行しますが、ここでは目的地アスペン空港にできるだけ安全に到着できるように、多くのVORの間を飛行します。
このチュートリアルでは、「HBU’VOD」を使用します。
VOR vrtypomtをStyvectorのToutingに追加するには、灰色の矢印の後にある「Flight Plan」ボックスにデータを入力し、「hbu」と入力します。エンターキーを押すと、地図が自動的にテルライドとアスペンの間のプランにVORを入力します。
理論的には、同じルートをシミュレーターでも似たような方法で描くことができますが、スタイベクターのようなツールを使うことは、いくつかの理由から重要です。
- VORラジオの詳細が含まれている(航空機で必要となる)。
- .近くの地形や注意すべき点を確認することができます。
注意 VORの詳細 VORの周波数と詳細をメモしておくと、その情報をフライトシミュレーターに取り込むことができます。
SkyVeciorを見ればわかるように、VORの周波数はSk>vectorのチャートで明らかになっています。このことをメモしておいてください(あるいはこのガイドを手元に置いておいてください)。
考察
スカイベクターのもう一つの便利な機能は、あなたが取るべき他の考慮事項を教えてくれることです。 テルライド空港から離陸すると、あなたはすでに海抜9000フィートの山の中にいることになります。この空港を離陸するパイロットは、スカイベクターを使って山間部を通過するための適切な許可を得る必要があります。
スカイベクターでは、周囲の状況や障害物、地形の高さを確認することができます。スカイベクターで提供されているビジュアルチャートを使用して、これらの山々の高さを知ることができます。 茶色の色合いが濃いほど、地形の高さが高いことを示しています。
SkyVectorでVORをルーティングに追加するには、「フライトプラン」の欄にデータをS-入力する必要があります。灰色の矢印の後、<“**”に “HBU\”と入力すると、テルライド-アスペン間のVORが自動的に入力されます。
なぜこれが重要なのか?
理論的には、シミュレータでも同じような方法でルートを描くことができますが、SkyVectorのようなツールを使うことは、いくつかの理由で重要です。
- VOR無線の詳細が含まれている(航空機で必要となる)。
- 近隣の地形や考慮すべき点を確認することができる。
- 我々のルートをプロットしたデータを使って、我々のコースデータを知ることができる。
VOR Details VORの周波数と詳細をメモしておくと、フライトシミュレーターにその情報を持ち込むことができます。
Skyvectorを見れば分かるように、VORの周波数は Skyvectorのチャートから明らかです。 これをメモしておいてください(またはこのガイドを手元に置いておいてください)。
考慮点
Skyvectorのもう一つの便利な機能は、あなたが取るべき他の考慮点のアイデアを与えてくれることで す。
テルンデ空港を離陸すると、すでに海抜9000フィート、山の上にいることになります。パイロットは、空港のIの中で適切なクリアランスを取得し、山岳地帯を通過するために行われる必要があります。
スカイベクターを使えば、周囲に何があるのか、どんな障害物があるのか、地形の高さはどれくらいなのか、などを確認することができます。
スカイベクターに搭載されたビジュアルチャートで山の高さを知ることができ、茶色が濃いほど高い地形であることがわかります。スカイセクターを使用して、現在のルートをスキャンし、回避する必要がある最も高い地形を見つけることができます。
危険から逃れるためのルート

搭乗する空港の周辺にある危険な場所について理解できたと思いますので、さらに詳しく説明します。
今から準備しておくことで、フライトに備えることができます。パイロットの時間の多くは、どんなff/entualityにも対応できるように計画し、準備することに費やされていることがすぐにわかるでしょう。
Chisを念頭に置いて、このフライトを安全に成功させるために、さらに2つのウェイポイントをpfotすることになります。
ウェイポイント1:離陸後
SkyVectorのマップをよく見ると、テルライドは非常に高い地形に囲まれていることにお気づきでしょう。これを快適に回避するために、離陸後、山の上に登りながら出発から8nm直進することになります。

SkyVectorマップのPlacervilleの真下で右クリックします。

新しいメニューが表示されますので、GPS座標の横にある「計画」をクリックします。これで、ウェイポイントがプランに追加されます。
しかし、この時、VOPウェイポイント「H B u」をこの新しいウェイポイントの後に移動させる必要があることに気づくでしょう。
このデータをもとに、ナブログデータをダウンロードし、ルートをより深く理解し、HBU VORに向かって正しく飛行するための重要なコースデータを取得することができるようになりました。
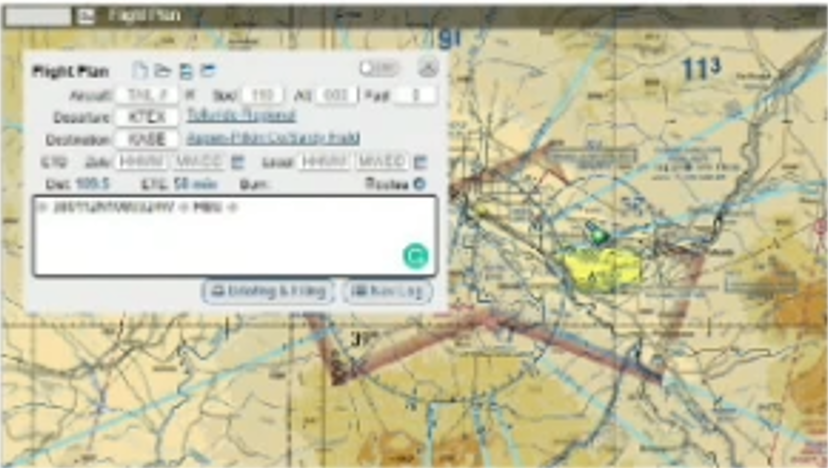
Nav Log “バートンはSkyvectorのTftcフライトDlanボックスの右下に表示されます。
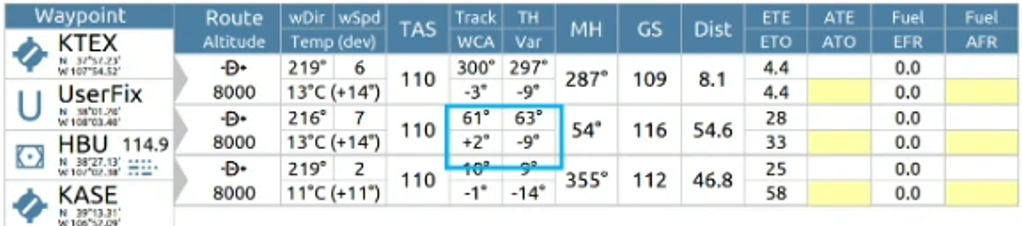
このナビログデータを使って
ナビログは、パイロットがルートをプロットする際に役立つ情報が満載です。あなたは、私たちの計画のVORに飛ぶために、航空機に設定する必要があるコースの情報を抽出すれば良いのです。
上のInformationを見ると、最初の離陸ルートを飛んだ後、061へ向かって右折し、H GUのVOPへ行くコースが必要です。
SkyVectorの地図上のどこにデータを置くかによって、多少の誤差が生じます。
もし、上記と多少の違いがあっても大丈夫です(左右10度ずつずらす)。
このようにデータが揃い、ルートも見えてきましたので、シミュレーターに戻り、G3000で航空機に情報を入力します。
PART 2 – 寒さと暗さのセットアップ
シミュレータ内の機体に戻って、機体を暖め、最初のステップで発見したデータを入力する準備をします。
チェックリスト・システムによるパワーアップ
航空機を学ぶのは大変なことですが、統合チェックリスト・システムを使用すれば、そのプロセスを簡単に行うことができます。
このチュートリアルでは、TBM930のスイッチ、レバー、ボタンなどの操作方法を説明します。

あなたの飛行機は現在「コールド&ダーク」と呼ばれる状態になっています。
これは電源がないことを意味し、さらに重要なことは、冷えたコックピットを暖める方法がないことを意味します。

この状態を改善し、美しいコクピットに生命を吹き込むためのチェックリストを行っていきます。
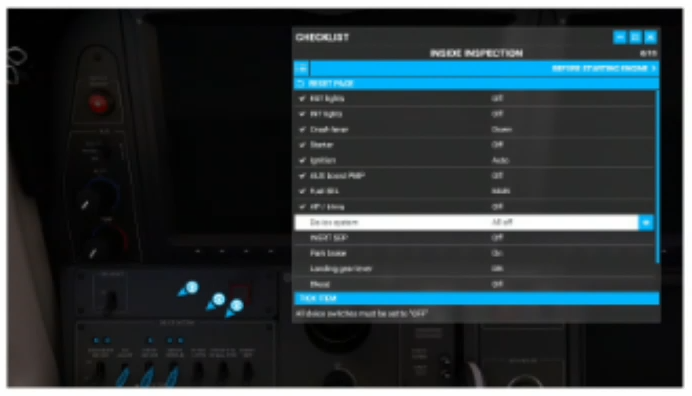
まず、統合されたチェックリストを表示し、「内部点検」チェックリストを選択し、項目にチェックを入れていきます。

なお、コクピット内の操作はすべてマウスで行えますが、ショートカットキーについては、キーの組み合わせを参照してください。
内部点検のチェックリストを終えたら、そのままエンジン始動前のチェックリストに移り、機体に電力を供給し、G3000機器のスイッチをONにします。
この間にコックピット内を見て、機能を確認しましょう。
先ほどのページで紹介した資料が参考になります。
トップヒント
クイックビュー」ボタン[目]を使用すると、チェックリストが機体のどの部分を参照しているかを素早く表示することができ、小さなボタンを見つけるのが非常に簡単になります。
PART 3 – ルートを設定する

電源を入れたら、アスペン空港までのルートをプログラミングしてみましょう。プログラミングはG3000機器と中央画面下のタッチパッドで行います。
Garmn C3000は、前回のチュートリアルで紹介したG1000に比べてより洗練されたソフトウェアです。)
しかし、慣れ親しんだ外観と機能をたくさん持っています。
このチュートリアルは、外観と機能を想定しています。
このチュートリアルでは、G1000とG10C0、G3000とTBM930のルートをシミュレーターで設定することができます。
VORの設定

このチュートリアルの最初の部分で述べたとおりです。
最初に基本的なフライトプラン(テルライドからアスペン)でシミュレータを起動すると、G3000はすでにシステムに登録されているCPSのルートを表示しますが、VORを使用してアスペン空港までナビゲートします。
HBU “VORをプログラムする必要があります。
をクリックすると、通信周波数が表示されます。ナビゲーションの周波数を変更するには、オーディオと無線を選択する必要があります。

VORの周波数は覚えていますか?
周波数の部分をクリックすると入力画面が表示されますので、正しいデータを入力してください。 上部のノブ[1]で中央のボタンを数秒間クリックすると、スタンバイ周波数(114.90)がアクティブになります。
新しいVOR位置がシステム上で有効になり、PFDに新しい情報が表示されます。
重要:情報を正しく表示するために、PFD[2]のソフトキーを使って、アクティブナビをVOR1/NAV1に変更する必要があるかもしれません。

もうひとつのウェイポイントとは?Skyvectorで作成したその他のウェイポイントは、2つの目的で使用されます。
もう一つは、離陸後にVOPに誘導するためのコース情報を入力し、近くの山をクリアするために必要なデータを提供することです。
オートパイロットの機能を使ってコースを設定することが、コースを維持するための重要なポイントです。
PART 4 ・ オートパイロットの設定

オートパイロットのパネルで調整し、その結果をPFDで確認することができます。
高度:16.000フィート
コース:300度
Heading: 274(滑走路の方向)。

この後、フライトディレクター(FD)とヨーダンパーのスイッチを入れますが、オートパイロットのスイッチは入れないでください。
これでオートパイロットの初期設定と、アスペンエアポットまでのルートのプログラミングが完了しました。

準備ができたら、ATCパネルを呼び出し、ATISオプションで最新の天候を取得します。
このプリセットを設定すると、滑走路27から出発し、西からの風は8ノット、空は快晴であることを知ることができます。