Processor Select Panel

プライマリーSPインジケーター。どちらのシステムプロセッサがプライマリであるかを点灯で表示します(「SP1」または「SP2」)。
SP セレクト。CPG がプライマリ・システム・プロセッサを手動で選択することを可能にする。AUTOモードでは、あるシステムプロセッサが信頼できなくなった場合、もう一方のシステムプロセッサが自動的にプライマリになります。2 つの手動モードでは、システムプロセッサが劣化した場合、CPG は手動でシステムプロセッサを変更する必要があります。
- AUTO。最も健全なシステムプロセッサが自動的にプライマリとして選択される。
- SP1。SP1がプライマリ、SP2がセカンダリになります。
- SP2。SP2 がプライマリ、SP1 がセカンダリになります。
CPGコックピット、HOCAS(ハンズオン・コレクティブ&スティック)
サイクリック・コントロール
パイロットのサイクリック・コントロールの項を参照。CPGサイクリックを折りたたむことで、飛行していない時のCPGの干渉を防ぐことができる。
コレクティブコントロール
パイロットのコレクティブコントロールをご覧ください。CPGのコレクティブには、具体的に次のような機能があります。
サイトセレクト
- TADS(右)。TADS をアクティブな照準として選択します。TADS の視線は武器の照準に使用されます。
- LINK (Aft)。TADS をアクティブにした場合、FCR の中心線を TADS の LOS にスレーブします。
FCR の場合、TADS LOS を FCR Next-To-Shoot (NTS)にスレーブします。パイロットのアクティブサイトが FCR で、CPG が LINK を命令した場合、パイロットのアクティブサイトは HMD となる。
FCR スキャン。選択された照準が FCR、または FCR とリンクした TADS の場合、FCR 送信機をアクティブまたは非アクティブにする。それ以外の場合は機能しません。
- S-SCAN(前方)。シングルスキャンバーストを行います。
- C-SCAN(後方)。連続スキャンバーストの有効/無効を切り替えます。
BUCS セレクト。バックアップコントロールシステム(BUCS)の制御優先順位をCPGコックピット制御に手動で切り替える(非可逆)。
INTEGRATED HELMET AND DISPLAY SIGHTING SYSTEM (IHADSS)
IHADSS(Integrated Helmet and Display Sighting System)により、乗組員は飛行・航法情報、センサー映像、照準情報、武器の状態などを確認することができます。IHADSSはまた、各クルーの頭の動きを使って、武器やセンサーを個別に呼び出すことができ、夜間の飛行オペレーションを行う上で不可欠なシステムです。パイロットはヘルメットディスプレイユニット(HDU)内でフライトシンボロジーフォーマットを提示されます。CPGは照準器の選択により、HDU内でFlight SymbologyフォーマットかWeapon Symbologyフォーマットのどちらかを表示されます。
Transition Mode
Bob-Up Mode Figure
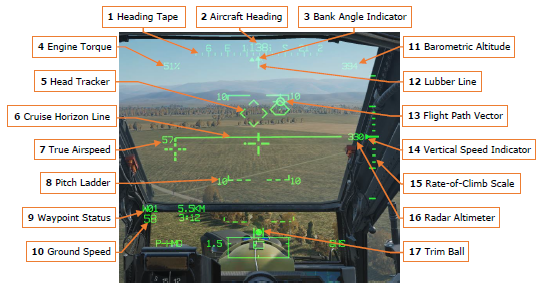
- ヘディングテープ。180°幅のコンパス方向を10°単位で表示し、30°ごとに10分の1の値で方位または方角を表示します。
- 航空機のヘディング(HDG)。ヘディングテープに重ねて、現在の航空機の方位を1°刻みでデジタル表示します。
- バンクアングルインジケーター。機体のバンク角を表示します。Cruiseモードの時のみ表示される。
- エンジントルク(TQ)。2基のエンジンのうち、最も高いトルクを表示する。エンジントルクの値が12%以上に分かれると、トルクのデジタル表示が点滅する。98%以上のトルクの周りにはボックスが表示されます。
- 5. ヘッドトラッカー。航空機の兵装基準線(ADL、センターライン)を表し、方位角0°、仰角0°を表示する。PNVSやTADSを使用して飛行・航行する際、特に薄明かりの下で機首に対して自分の頭の位置を認識するのに役立つ。
- クルーズホライズンライン(Cruise Horizon Line)。LOSレチクルに対して水平線をピッチ軸で2:1の比率で表示します。
- 7. TAS (True Airspeed)。航空機の真の対気速度を0〜210ノットまで1ノット刻みで表示する。対気速度がVNEを超えるとボックス表示されます。Attitude Hold が作動しているときは、TAS のデジタル表示の周りに丸い “status window “ボックスが表示されます。
- ピッチラダー。航空機のピッチ角を10°刻みで最大30°まで表示する。Cruiseモードの時のみ表示される。
- ウェイポイントステータス。現在航行している地点の名称、距離(キロメートルまたは海里)、現在の対地速度、到着予定時刻(ETE)が表示される。ETEは現在の対地速度に基づいており、ETEが5分以上の場合はHH:MM形式で、5分未満の場合はM:SS形式で表示されます。対地速度が15ノット未満、またはETEが10時間以上の場合は表示されない。アクティブな目的地がない場合、残り距離は表示されません。
- 対地速度(GS). 地上での速度を1ノット刻みで表示する。プライマリーINUを合わせないと地上速度は表示されません。
- 大気圧高度(MSL)。航空機の気圧高度。-2,300 フィートから 20,000 フィートまで、10 フィート刻みで表示される。Cruiseモードの時のみ表示される。
- Lubber Line. Lubber Line は機体の中心線に沿った線で、機体方位とCruiseモードのバンク角指示の基準として使用される。
- 飛行経路ベクトル(FPV). 飛行経路ベクトル(FPV)は、ヘリコプターがどの方向に向かって飛行しているかを示すものである。これは機体の速度を3Dで表現したものである。3D速度の大きさが地上速度5ノット以下、またはウェイトオンホイールの場合、FPVは消える。
- VSI(Vertical Speed Indicator)。Vertical Speed Indicator(VSI)は上昇率スケールを上下に動かして、垂直方向の速度を表示します。VSIは上昇速度の±1000 fpmの目盛りで飽和状態になります。
- 15.上昇率目盛 上昇率表示目盛りは、100fpmの上昇率目盛りを±500fpmまで表示し、その後、1000fpmの目盛りを表示します。上昇率が±1000fpmを超えると、上昇率最小または最大目盛りに隣接して100fpmの感度でデジタル表示されます。
- レーダー高度計(AGL)。0 から 1,428 フィートまでの地上からの航空機の高度。高度が 50 フィートまでは 1 フィート単位、50 フィートから 1,428 フィートまでは 10 フィート単位で表示される。レーダー高度計のデジタル表示は、1,428 フィートを超えると表示されなくなります。高度ホールドが作動すると、レーダー高度計のデジタル表示の周りに丸みを帯びた「ステータス・ウィンドウ」ボックスが表示されます。
- スキッド/スリップ・インジケータ(トリム・ボール). 横方向の加速度や、航空機が調整飛行(「エアロダイナミックトリム」または「イントリム」)していることを示す。
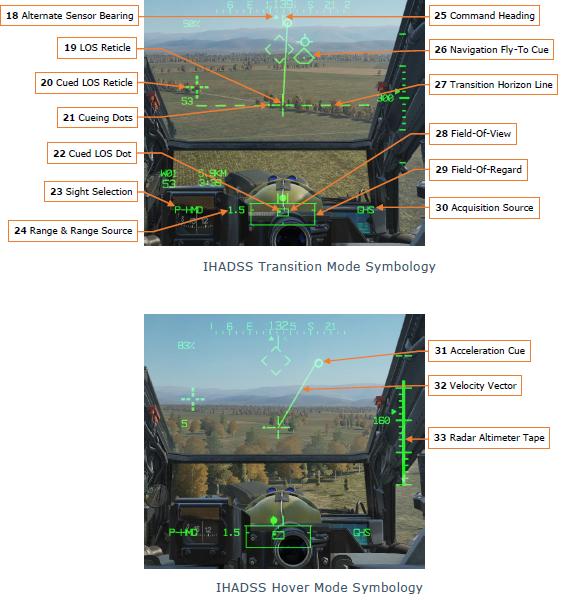
- オルタネートセンサーベアリング。反対側の乗員の選択したHMDまたはTADS LOSの方位角を示す。相手側の照準がFCRの場合、代替センサの方位は表示されない。
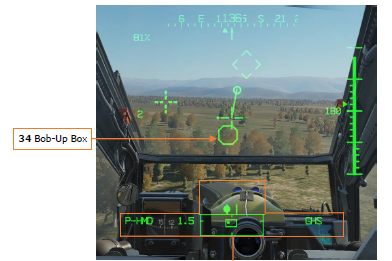
- LOSレチクル。選択した照準の視線位置を示します。ヘッドトラッカー、ホライゾンライン、ベロシティベクトル、アクセラレーションキュー、ボブアップボックスの基準として使用されます。また、武器を使用する際の照準用十字線としても使用されます。LOSレティクルは、クルーのLOSが無効な場合、選択したNVSセンサーがスルー限界に達している場合、銃が作動して銃システムが故障しクルーのヘルメットに追従しなくなった場合に点滅します。クルーズモードでは、LOSレティクルは太字で表示されます。
- Cued Line-Of-Sight (LOS) レティクル。クルーに対して、選択した捕捉源の位置を示す。パイロットの WPN UTIL ページで CUEING (R1) が選択されていない場合、このマークは表示されない。
- CUEING Dots. CUEING LOS レチクルに乗員の LOS をキューイングするために、選択された捕捉源の象限方向を示す。LOSレチクルに対してキューイングされたLOSレチクルがその象限の4°以内にあるとき、ドットは削除されます。ハイ・アクション・ディスプレイのSight Statusフィールドに “IHADSS B/S REQUIRED “のメッセージが表示されると4つのドットが点滅し、IHADSSのボアサイトが必要であることを示している。パイロットの WPN UTIL ページで CUEING (R1) が非選択の場合は、このマークは表示されない。
- CUEED Line-Of-Sight (LOS) Dot. 視野枠内で選択された捕捉源の相対方位と相対仰角を示す。
- 視力選択。クルーが選択した照準が表示されます。パイロットは HMD と FCR を選択することができる。CPG の場合、HMD, FCR, TADS のいずれかを選択します。
- レンジとレンジソース。使用中のレンジソースと、現在のレンジをキロメートル単位、メートル単位で表示する(レーザーのみ)。使用可能なレンジソースは以下の通りです。
a. デフォルトの範囲。パイロットは 1.5 km、CPG は 3.0 km。
b. 手動範囲。100~50,000メートル(M0.1~M50.0と表示されます。)
c. オートレンジ 0.1km~50km(A0.1~A50.0と表示します。)
d. ナビゲーションレンジ 0.1~32km(N0.1~N32.0と表示されます。)
e. レーダー距離 0.1~9.9 km(R0.1~R9.9と表示されます。)
f. レーザー距離 500~9999m(500~9999と表示されます。) - コマンド/ボブアップ・ヘディング コマンドヘディングシェブロンは、ナビゲーションフライツーキューへのヘディングを示します。ボブアップモードで操作する場合は、ボブアップモードに入った時の機体のヘディングを表します。
- Navigation Fly-To Cue(ナビゲーション・フライ・トゥ・キュー)。ナビゲーション用に選択された現在の地点の位置を示す。Navigation Fly-To Cueはホームプレートとも呼ばれ、飛行経路ベクトルがその中に収まるような大きさになっており、正確な3次元航法が可能です。Navigation Fly-To Cue は、航空機がウェイトオンホイールの時は表示されません。
- トランジションホライズンライン。LOSレチクルに対して、ピッチ軸方向に4:1の割合で、最大±30°のピッチで水平線を表示します。航空機のピッチ姿勢が30°を超えると、ピッチ姿勢が30°以下になるまで、水平線は最大偏位で飽和したままとなる。
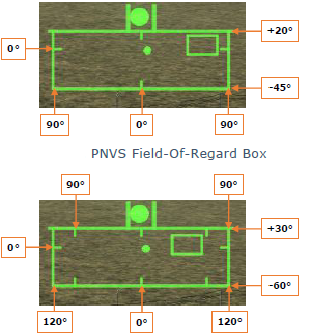
- 視野角ボックス。視野枠は、PNVSまたはTADSの30°×40°の視野の、視野枠内での相対的な位置を示す。
- 視野枠(FOR)。外側のボックスは、現在のセンサーのアジマス制限を示す。FOR ボックスの端にあるチェックマークは、各センサーの限界値を示すのに役立ちます。
- アクイジション・ソース(ACQ)。現在選択されているアクイジションソースを示す。アクイジションソースには以下のものがある。
a. PHS – パイロット用ヘルメットサイト
b. GHS – ガナーヘルメットサイト
c. SKR – 追尾型ミサイルシーカー
d. RFI – 無線周波数干渉計
e. FCR – 火器管制レーダー
f. FXD – 前方固定(機体中心線、方位角・仰角とも0°)。
g. W##、H##、C##、T## – (##は、保存されているウェイポイント、ハザード、コントロールメジャー、またはターゲット/脅威の番号です。)
h. TRN – カーソルで選択されたTSD上の地形位置 - Acceleration Cue(アクセラレーション・キュー)。加速度キューは、航空機の加速度の大きさと方向を示す。速度ベクトルは、常に加速度キューの中心を目指す。サイクルを変位させると加速度キューも変位するため、加速度キューはサイクルの表現と考えることができる。
Hover または Bob-Up シンボロジーモードでは、ベクトルが最大スケールより小さい(「飽和」していない)場合、加速度キューの原点は速度ベクトルの外側の端からになります。速度ベクトルが最大スケールより飽和している場合、加速度キューはLOSレチクルの中心を原点とする。
- 速度ベクトル(VV). 速度ベクトルは、ヘリコプターが地面を横切って移動する2次元的な方向と大きさを示す。LOSの中心は、マストに近い点を表します。ホバーモードでは対地速度6ノット、トランジションモードでは対地速度60ノットで速度ベクトルは最大飽和に達する。

ウェポン・シンボロジー
詳しくは、「目標捕捉指定視力」をご覧ください。